郴州 网站建设优化网站排名方法教程
频响函数是描述线性时不变系统(LTI) 在频域内动态特性的核心物理量。它定量表征了系统在受到外部激励时,输出响应与输入激励在不同频率下的幅值比和相位差关系。
设系统输入(激励力)为时域信号 ,输出(响应,如位移、速度、加速度)为时域信号
一 频域关系
对输入 和输出
进行傅里叶变换(FT),系统的频响函数定义为:
: 复数形式的频响函数
: 角频率(单位为 rad/s)
二 复数的物理意义
幅值 :输出响应幅值与输入激励幅值的比值(单位:响应单位/激励单位,例如 m/N, (m/s)/N, (m/s²)/N)。
物理意义: 系统对该频率激励的放大/衰减程度。
相位 :输出响应相对于输入激励的相位滞后角(单位:度 ° 或弧度 rad)。
物理意义: 响应滞后于激励的时间差()。
实部 与虚部
:提供振动模态的共振特性信息(模态振型由虚部主导)。
三 FRF的重要性
3.1 模态参数的载体
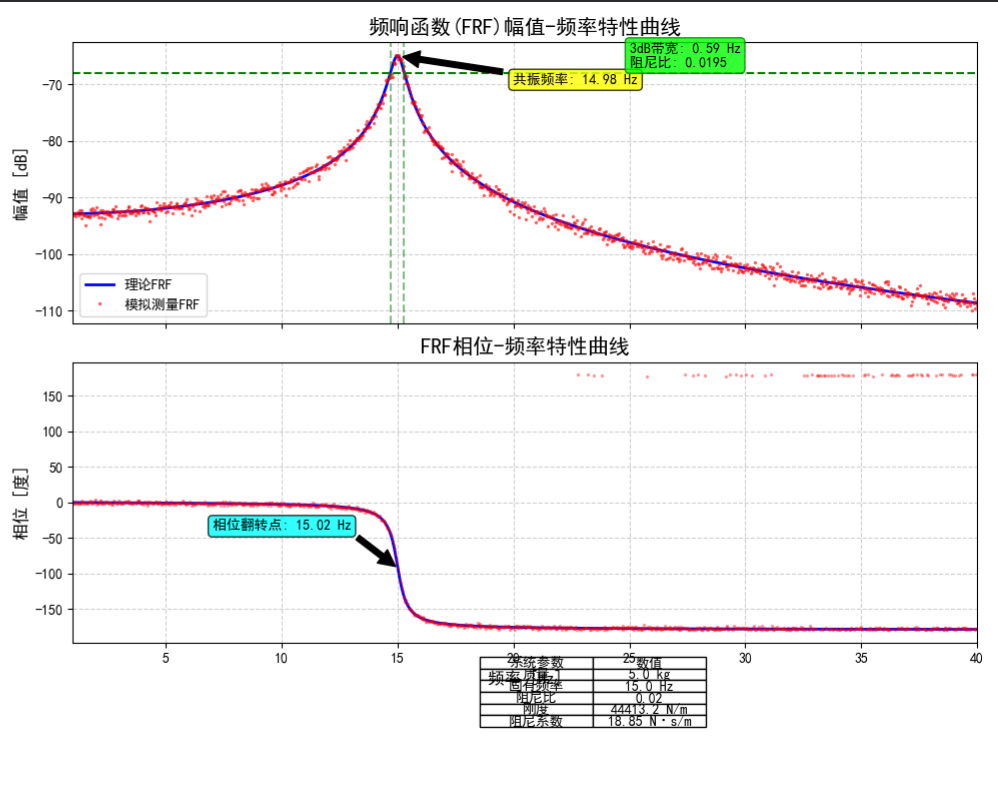
FRF 的幅值-频率曲线上的峰值对应结构的固有频率 , 峰值形态/宽度反映阻尼比
, 相位变化规律(如通过0°/180°)指示共振点,曲线上不同点的值
与模态振型
直接相关。
阻尼比讲解:
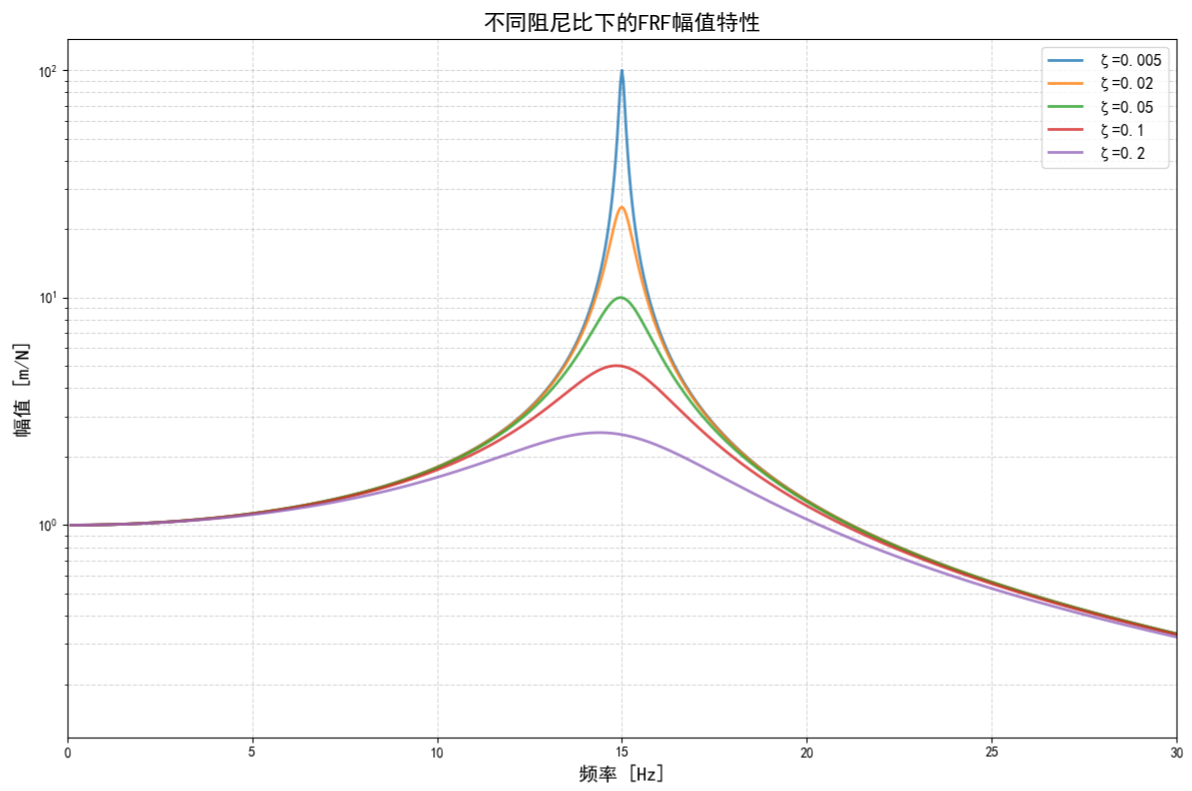
峰值形态直接反映了系统的能量耗散能力:
高阻尼系统:峰值较宽且平坦,能量快速耗散。
低阻尼系统:峰值较窄且尖锐,能量容易积累。
通过 半功率带宽法 定量计算阻尼比:
import numpy as np
import matplotlib.pyplot as plt# 系统参数
mass = 5.0 # 质量 (kg)
fn = 15.0 # 固有频率 (Hz)
damping_ratios = [0.005, 0.02, 0.05, 0.1, 0.2] # 不同阻尼比# 创建图表
plt.figure(figsize=(12, 8))for zeta in damping_ratios:# 计算FRF(位移响应/力)freq = np.linspace(0.1, 40, 1000) # 频率范围omega_n = 2 * np.pi * fnomega = 2 * np.pi * freqH = 1 / (1 - (omega/omega_n)**2 + 1j*(2 * zeta * (omega/omega_n)))# 计算幅值(dB)mag_db = 20 * np.log10(np.abs(H))# 绘图plt.semilogy(freq, np.abs(H), linewidth=2, label=f'ζ={zeta}', alpha=0.8)# 设置图表属性
plt.title('不同阻尼比下的FRF幅值特性', fontsize=16)
plt.xlabel('频率 [Hz]', fontsize=14)
plt.ylabel('幅值 [m/N]', fontsize=14)
plt.grid(True, which='both', linestyle='--', alpha=0.5)
plt.legend(fontsize=12, loc='upper right')
plt.xlim([0, 30])
plt.tight_layout()
plt.show()
| 阻尼比 (ζ) | 峰值特点 | 物理意义 | 工程应用场景 |
|---|---|---|---|
| < 0.01 | 极高窄尖 | 能量耗散极慢 | 精密仪器、音叉 |
| 0.01-0.05 | 窄尖峰 | 轻度能量耗散 | 航空航天结构 |
| 0.05-0.1 | 温和峰 | 中等阻尼特征 | 汽车悬架系统 |
| 0.1-0.3 | 宽平峰 | 明显能量消耗 | 建筑隔震系统 |
| > 0.3 | 非常平缓 | 能量快速耗散 | 冲击吸收装置 |
相位变化规律的物理意义:
相位变化揭示了能量在系统中的存储与释放方式,反映了系统在共振区域的动态特性。
相位关系的基本原理
不同响应类型之间的相位关系遵循导数运算:
- 位移 x(t) → 基本响应
- 速度 v(t) = dx/dt → 相位超前90°
- 加速度 a(t) = d²x/dt² → 相位超前180°
| 响应类型 | 低频区(ω<<ωₙ) | 共振区(ω≈ωₙ) | 高频区(ω>>ωₙ) |
|---|---|---|---|
| 位移响应 | ≈0° | ≈-90° | ≈-180° |
| 速度响应 | ≈90° | ≈0° | ≈-90° |
| 加速度响应 | ≈180° | ≈90° | ≈0° |
典型相位变化特征
位移响应的相位变化
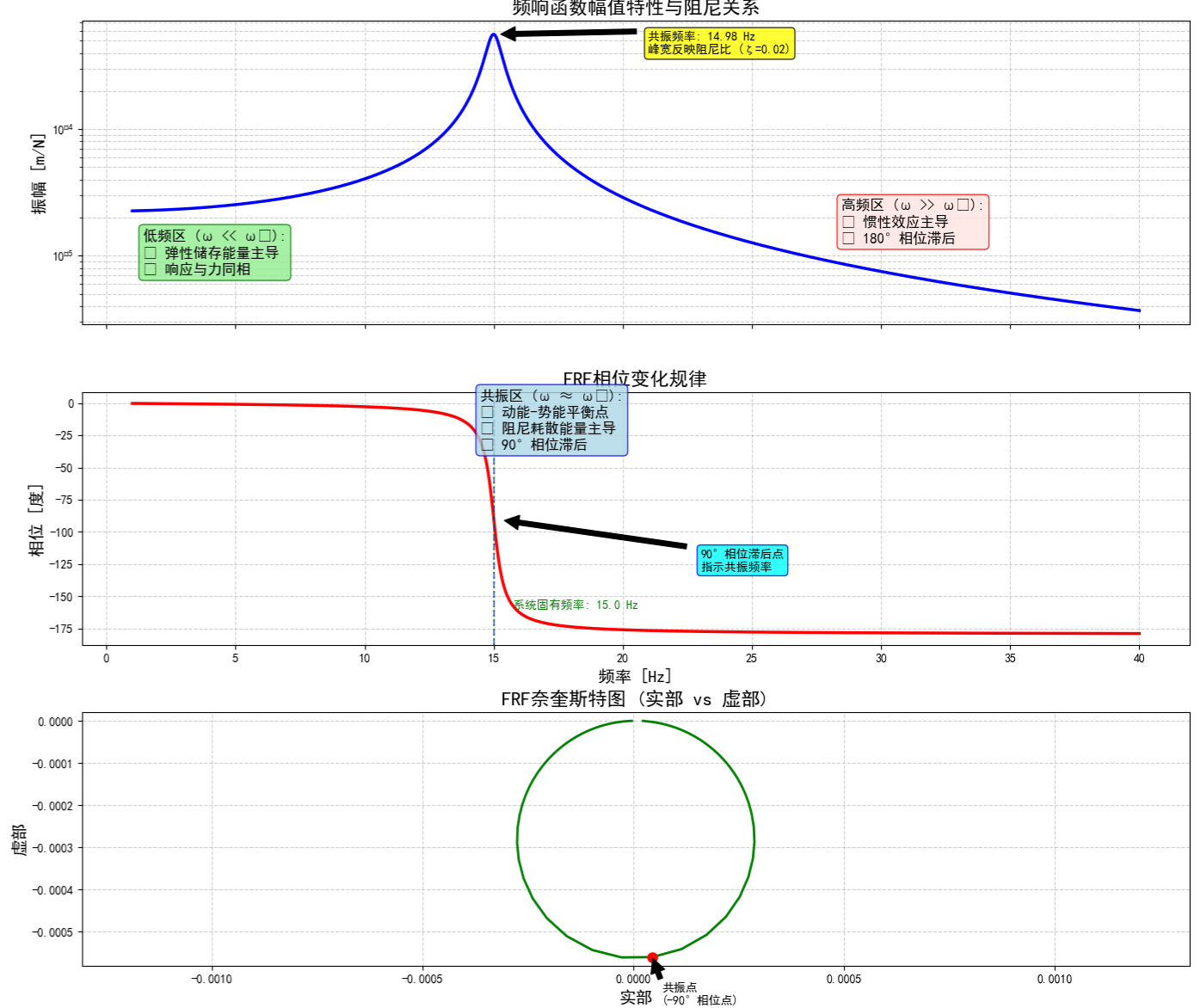
- 低频区 (ω ≪ ωₙ):
- 相位 ≈ 0° - 响应与激励同相
- 以弹性变形为主,系统表现为弹簧特性
- 共振区 (ω ≈ ωₙ):
- 相位 ≈ -90° - 响应滞后激励90°
- 相位突变:从 ≈0° → -90° → -180°
- 阻尼力主导状态,速度响应与激励力同相
- 高频区 (ω ≫ ωₙ):
- 相位 ≈ -180° - 响应与激励反相
- 以惯性效应为主,系统表现为质量特性
相位变化的物理机制
在共振频率附近 (ω ≈ ωₙ),相位变化率最大,这揭示了如下物理本质:
(1)能量存储形式转换
当驱动频率等于固有频率时:动能和势能以相同频率但相位差90°,振荡系统能量在动能和势能间不断转化
(2)能量输入效率最高点
-90°相移位置恰好是共振点,此时驱动力始终与速度同相,驱动力对系统做功效率最大
在频响函数分析中:
峰值形态宽度是结构能量耗散效率的直观体现:
峰宽 ⇧ → 阻尼比 ζ ⇧ → 能量耗散快
峰宽 ⇩ → 阻尼比 ζ ⇩ → 能量积累剧增
相位变化规律揭示了系统能量存储与转移机制:
0°相位:弹性势能存储(弹簧特性)
-90°相位:动-势能共振交换点(阻尼主导)
-180°相位:惯性效应(质量特性)
相位变化工程应用价值:
结构健康监测:阻尼比增大 -> 可能出现裂缝或连接松动,峰值频率下降 -> 刚度损失(如结构损伤)。
减振设计:通过添加阻尼材料扩大峰值宽度,降低特定频率下的振动能量
NVH工程:尖锐峰值导致车内噪声峰,宽峰造成宽带噪声问题
模态振型定义与核心概念:
模态振型是结构动力学中的关键概念,它描述了结构在特定自然频率下振动时的变形形态。简单来说,模态振型揭示了结构在特定频率下"如何振动",而不仅限于"振动多快"(频率)或"振动多强"(幅值)。
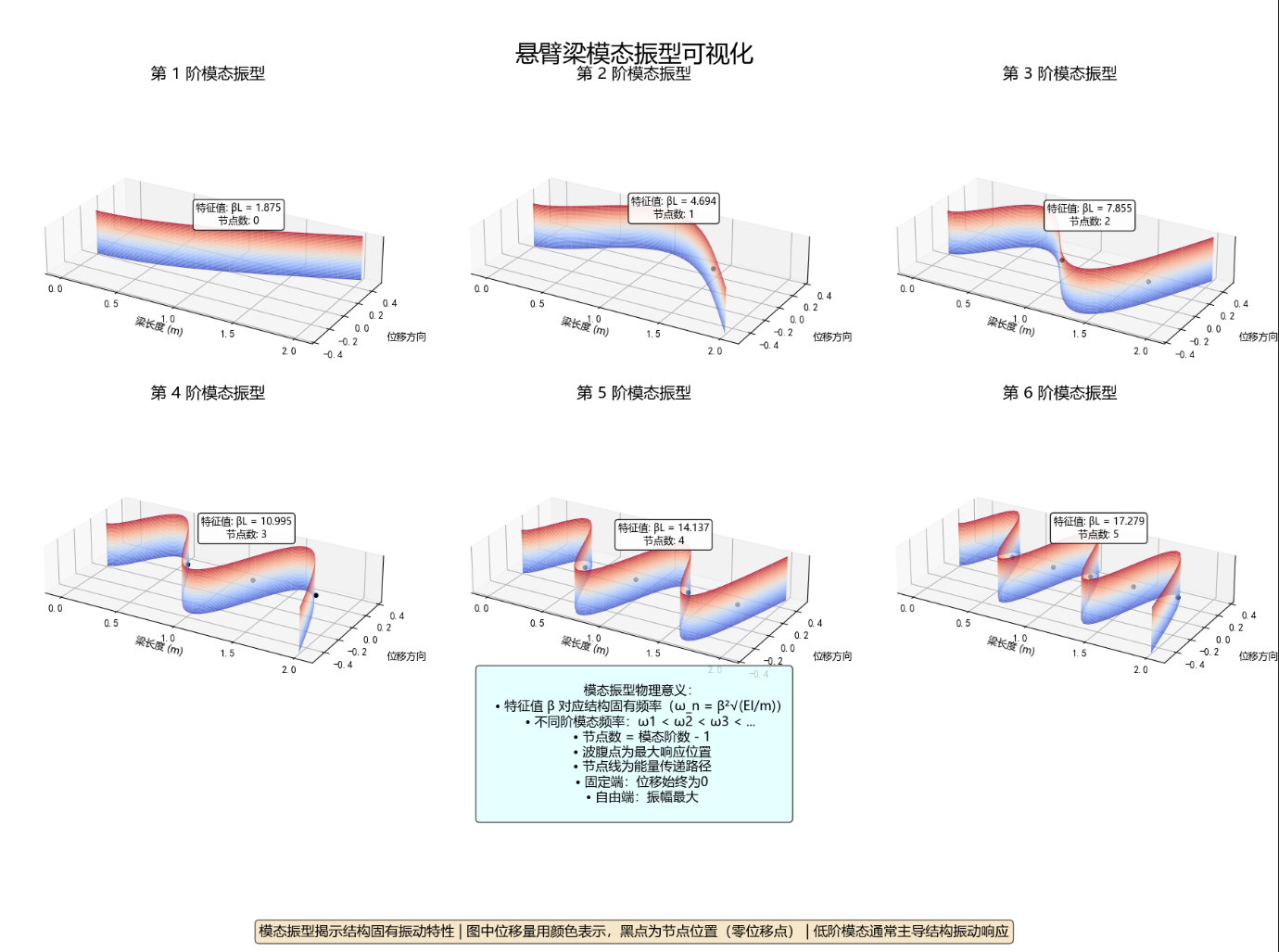
基本特性:
空间分布函数:展示结构各点相对位移关系
固有属性:仅依赖于结构的质量/刚度/边界条件
正交性:不同阶振型相互独立(数学上正交)
比例关系:只有相对振幅有意义,绝对幅值可归一化
PolyMAX等模态分析算法的目标,就是通过测量到的FRF数据,提取这些隐含的模态参数!
3.2 系统“指纹”
FRF 唯一确定了一个线性系统的动力学行为。已知 FRF 即可预测系统在任意已知激励下的稳态响应 。
3.3 损伤/缺陷诊断
结构发生损伤(如裂纹、松动)时,其动力学特性(质量、刚度、阻尼)改变,FRF 也会随之变化(如峰值偏移、幅值变化)。通过比较健康与损伤状态的FRF,可定位损伤位置。
四 FRF的测量(实验模态分析EMA的关键步骤)
(1)激励方式
冲击锤(锤击法):瞬态宽频带激励(成本低,效率高)。
激振器(正弦扫频/随机/伪随机):可控能量输入(信噪比高,适合精密测量)。
(2)响应测量
使用加速度计/激光测振仪在结构表面测点记录振动响应 。
(3)信号处理
对输入力信号 和输出响应信号
进行以下计算:
或
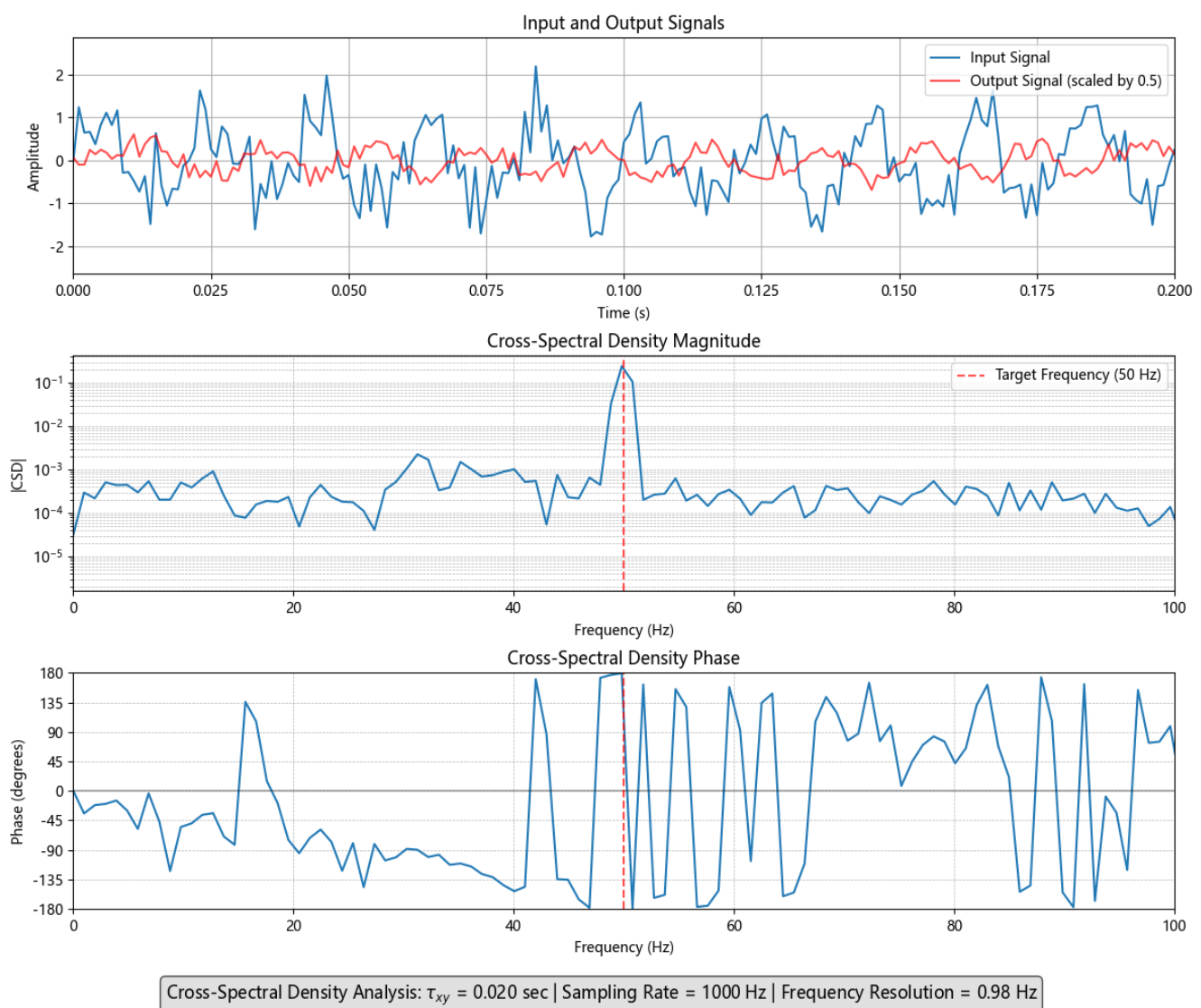
: 输入与输出的互谱密度 (Cross Spectrum)。
互谱密度描述了两个信号在频域中的相关关系:
- 描述两个信号之间的线性关系强度
- 幅值表示两个信号在特定频率上的耦合程度
- 相位表示频率成分之间的相位差
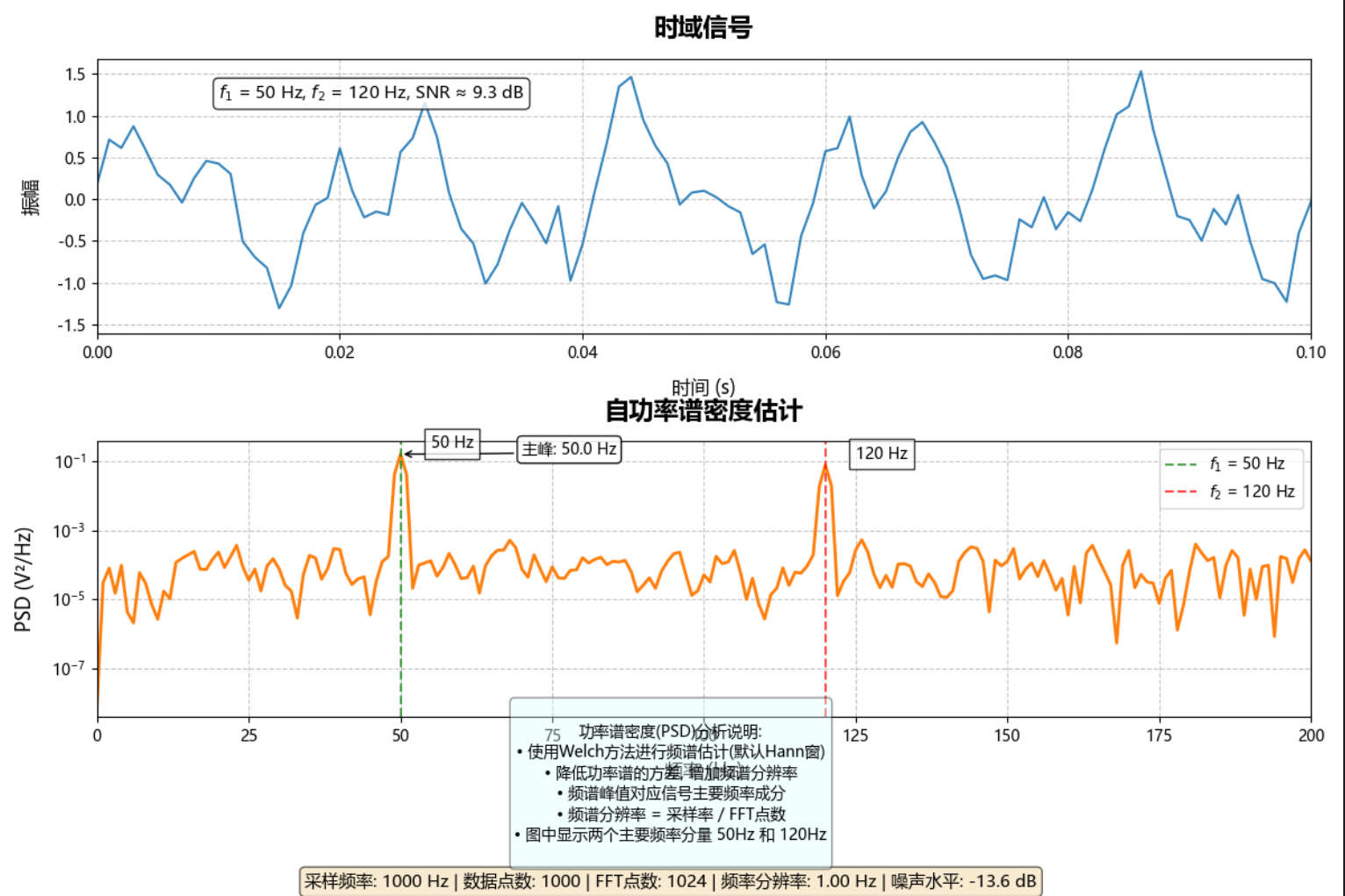
: 输入的自谱密度 (Auto Spectrum)。
自谱密度也称为功率谱密度 (Power Spectral Density, PSD),描述了信号功率随频率的分布:
- 表示信号频率成分的能量强度
- 峰值对应系统固有频率
-
积分等于信号功率:
信号平均功率
目的: 利用统计学平均抑制噪声干扰。
(4)FRF矩阵(多输入多输出MIMO)
当结构上有 个激励点和
个响应点时,FRF 扩展为
复数矩阵
:
:第 j 个点激励时,第 i 个点的响应与激励之比。
为什么用复数表示FRF?
振动是动态过程:
结构在共振频率下,响应峰值滞后激励力90°(阻尼控制)。
能量在动能和势能间周期性转化,需同时描述幅度和相位流动。
模态振型本质是复向量(特别是非比例阻尼系统),FRF虚部图直接反映谐振形态。
五 总结
FRF的工程核心价值
| 应用领域 | 作用 |
|---|---|
| 模态分析 | 提取固有频率、阻尼比、模态振型(PolyMAX等方法的核心输入) |
| 结构动力学建模 | 验证有限元模型(FEA)精度,修正模型参数 |
| NVH优化 | 分析噪声/振动的传递路径,设计减振、隔声方案 |
| 故障诊断 | 通过FRF偏移诊断刚度损失、裂纹、松动等结构损伤 |
| 载荷识别 | 已知响应 |
| 主动振动控制 | 设计控制器补偿系统传递特性 |
简言之:FRF是解开结构动力学“密码”的钥匙,PolyMAX等模态参数识别算法则是破译这些密码的精密工具。