dns网站建设/国家免费培训学校
强化学习
强化学习(Reinforcement Learning,RL)是一种机器学习方法,强化学习的基础框架是马尔可夫决策过程,它允许智能体(Agent)能够在与环境(Environment)的交互中通过试错来学习最优策略。
智能体在环境中执行行动(Action),并根据行动的结果接收反馈,即奖励(Reward)。这些奖励信号指导智能体调整其策略,以最大化长期累积奖励。
强化学习的核心是价值函数(Value Function),它估计了从给定状态出发并遵循特定策略所能获得的期望累积奖励。通过不断更新价值函数,智能体学会区分哪些状态和行动更有可能导致高奖励,从而做出更好的决策。
近年来,强化学习在多个领域取得了显著进展,尤其是在游戏、机器人、推荐系统和自然语言处理等领域。例如,AlphaGo利用深度学习和强化学习技术在围棋游戏中战胜了世界冠军,展示了强化学习在解决复杂问题上的巨大潜力。
1-参考网址
- 强化学习K臂老虎机问题
2-核心知识点
-
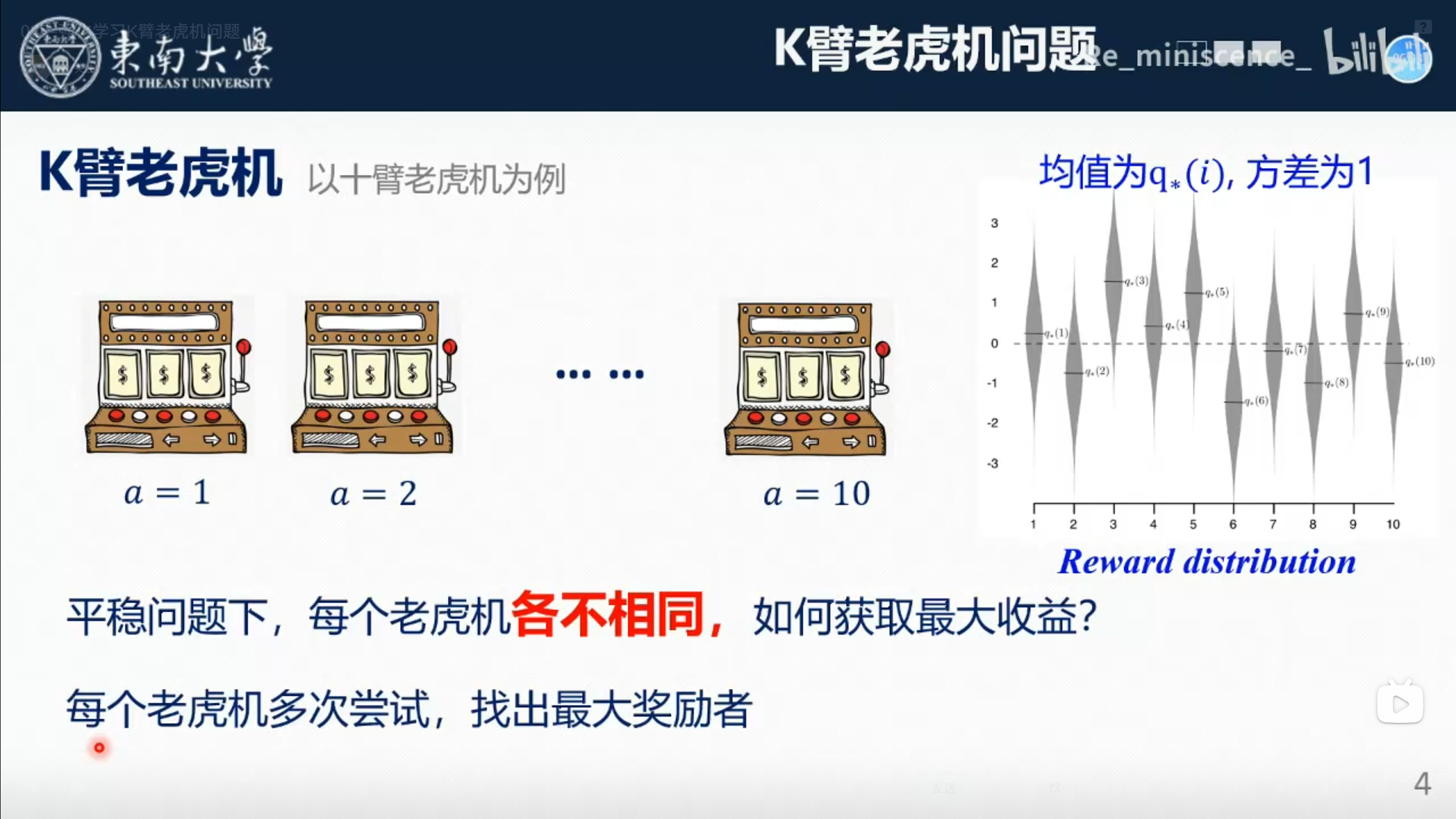
1-K臂老虎机问题的生活案例
-
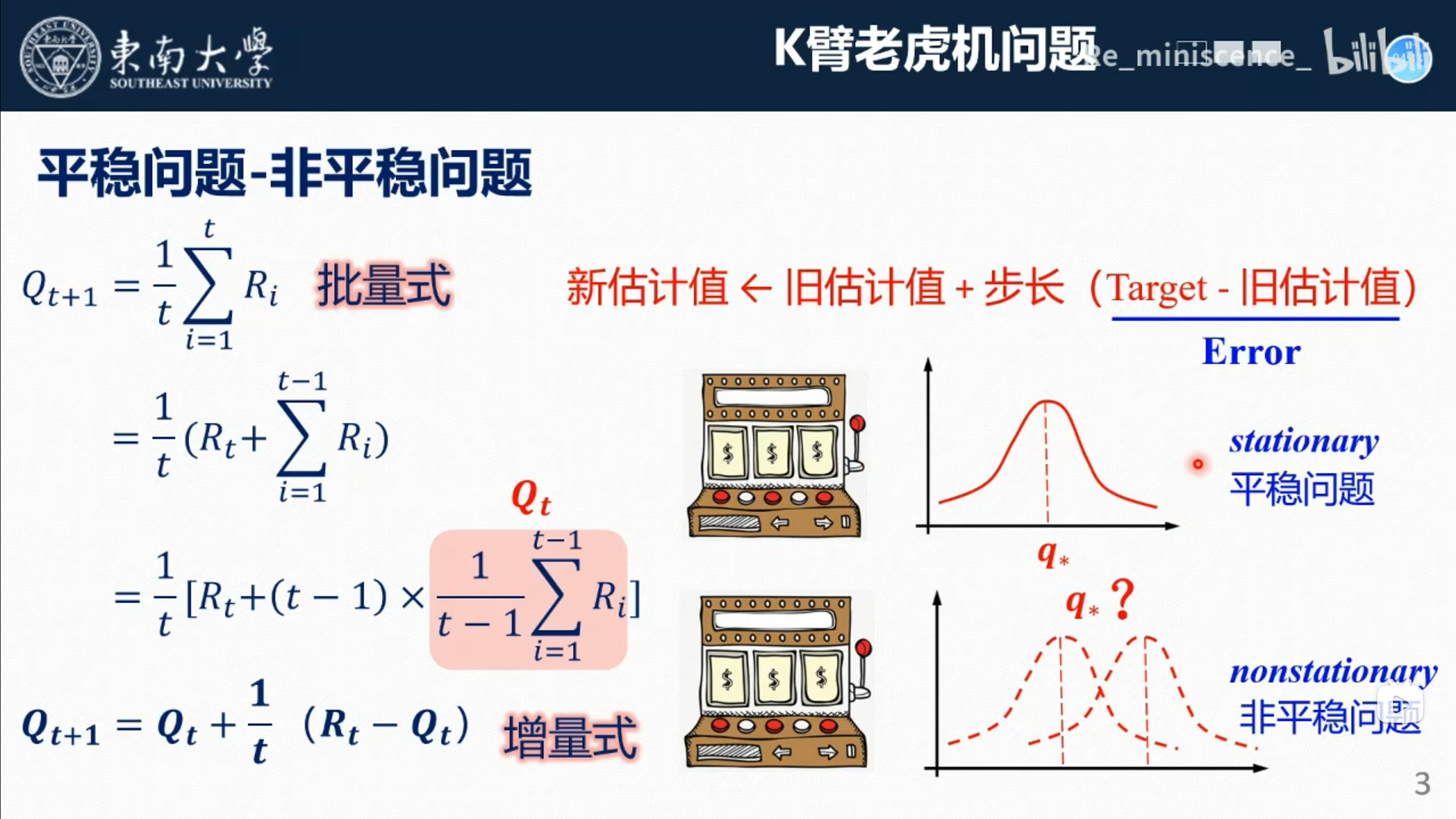
2-K臂老虎机问题的计算思路->使用新旧估计值推断,将原本连加的复杂计算变为简单的小学运算
-
3-什么是平稳问题/非平稳问题->老虎机是一种最简化的模型,计算的概率值都是固定的(先不考虑非平稳问题,每次的输出都是一个我们琢磨不透的一个变化的分布)
针对【第1个老虎机】每摇动5次就会中奖一次(假定奖励函数都是为1);
V1=0
V2=0
V3=0
V4=0
V5=1
==> Q1=1/5 -
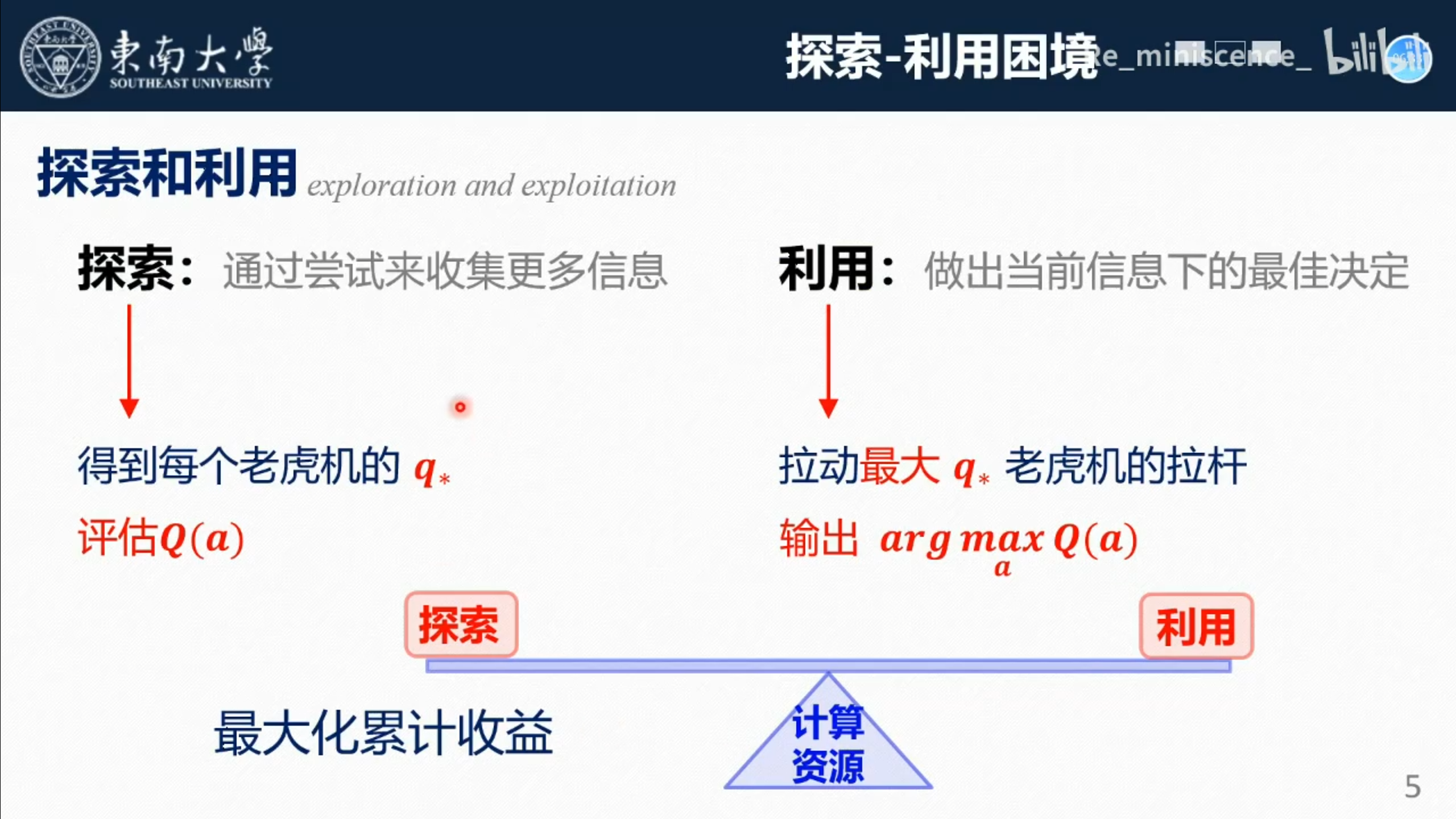
3-最大收益案例->由于【算力有限/尝试次数】有限引出【探索/利用困境】
-
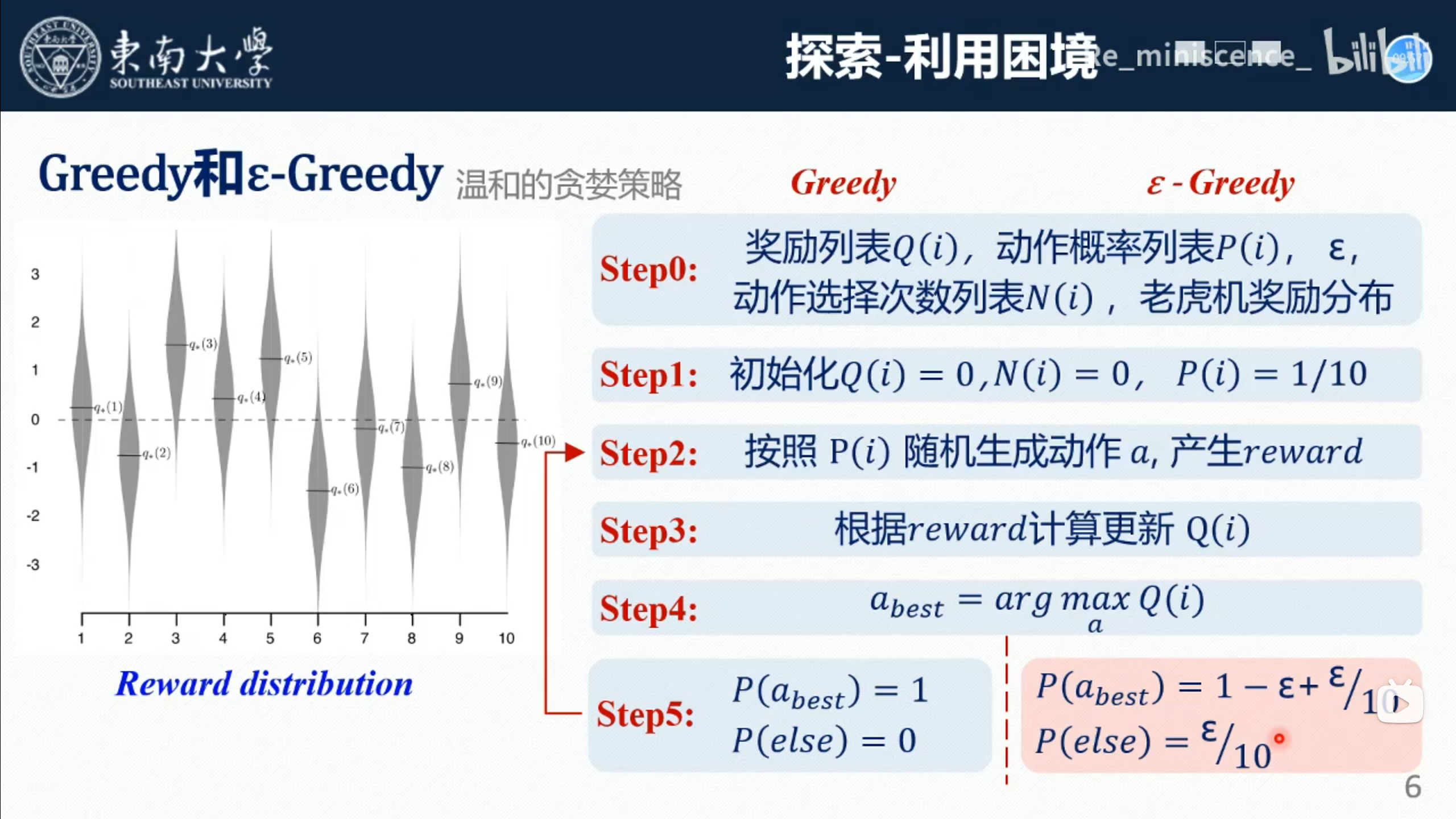
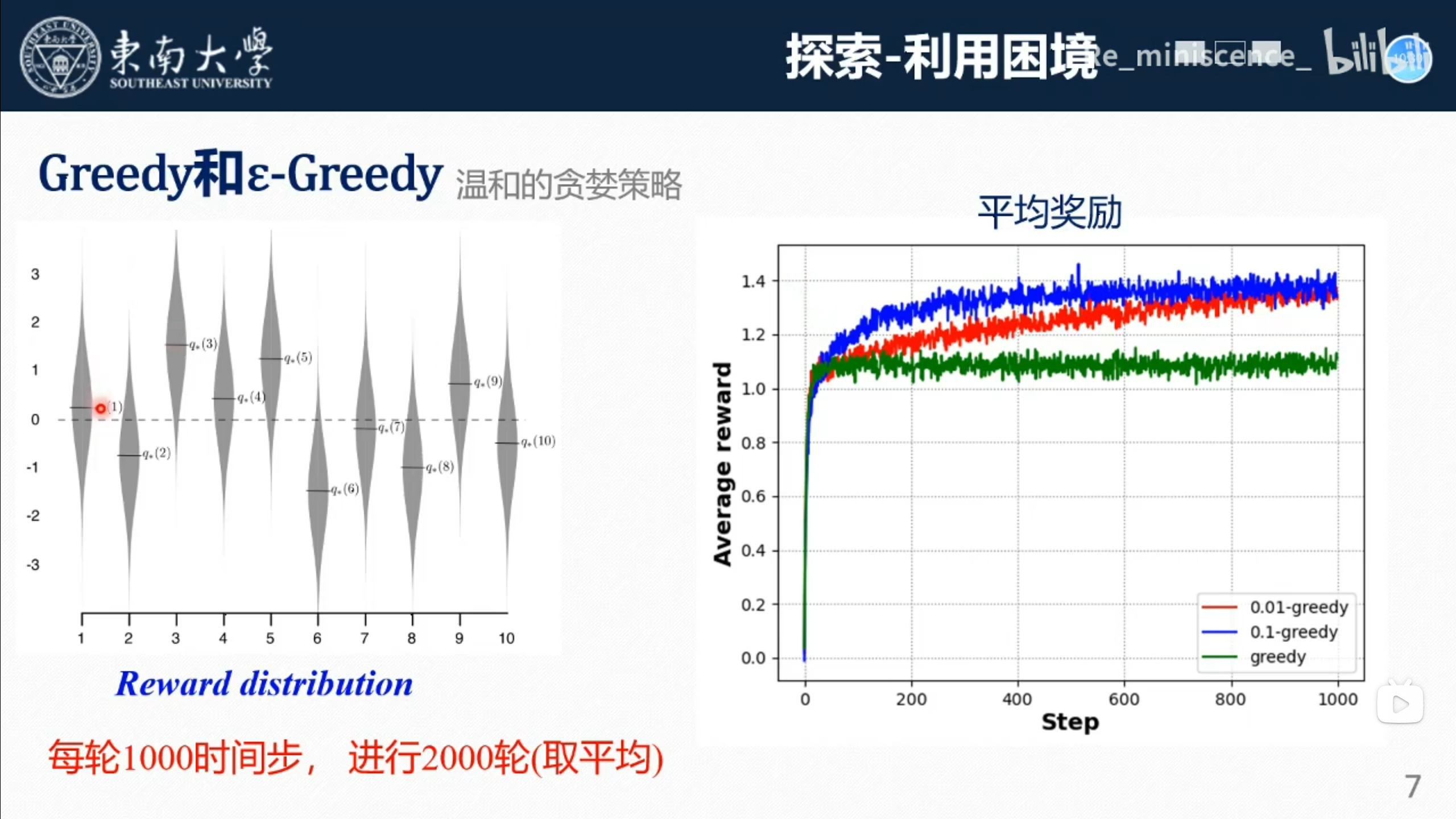
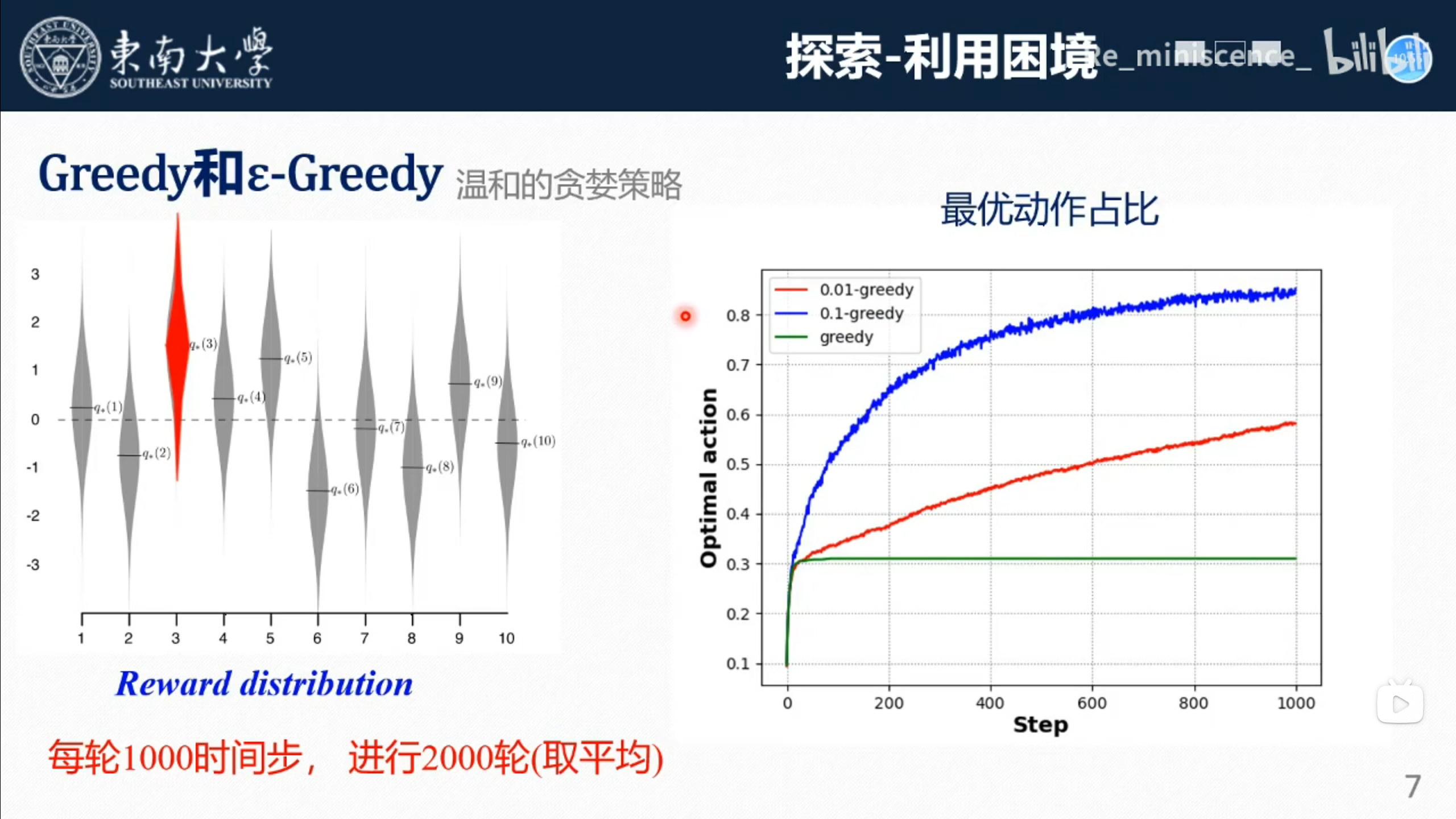
4-探索/利用困境的求解方案1->温和贪婪->不同的ε对结果影响较大
-
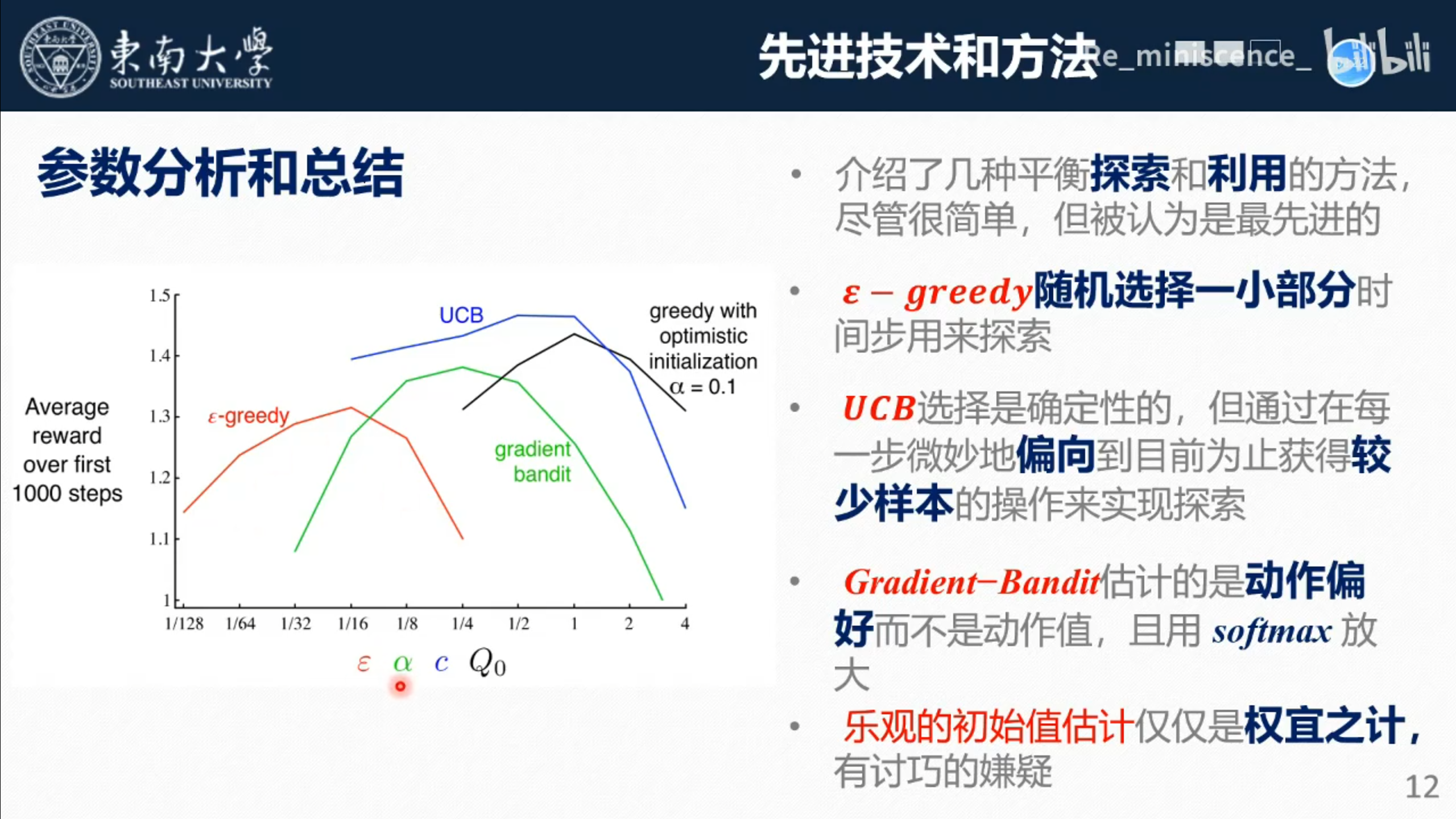
5-探索/利用困境的优化方案->【OIV积极初始值】+【UCB动作选择】+【GB梯度赌博算法】
-
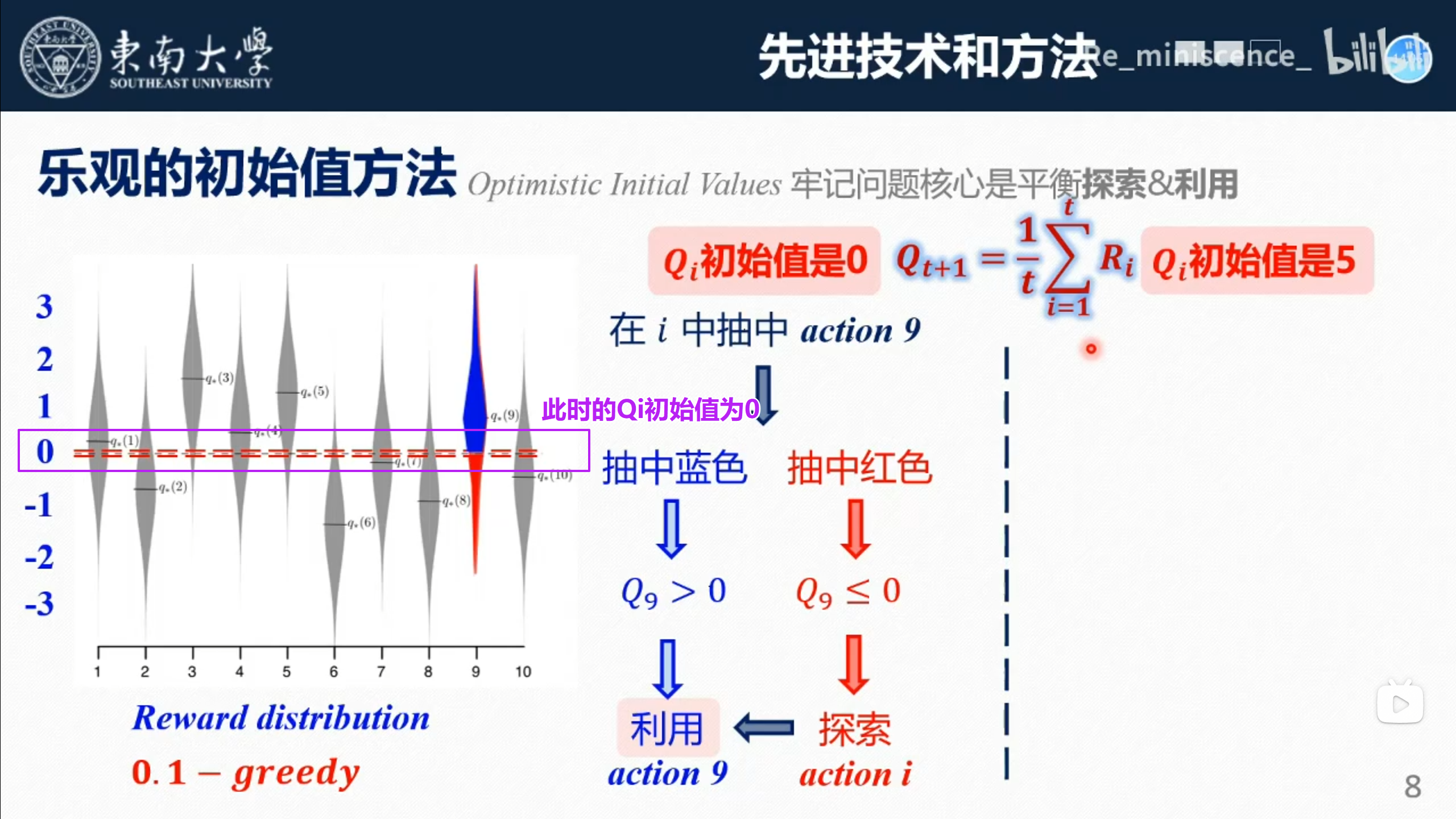
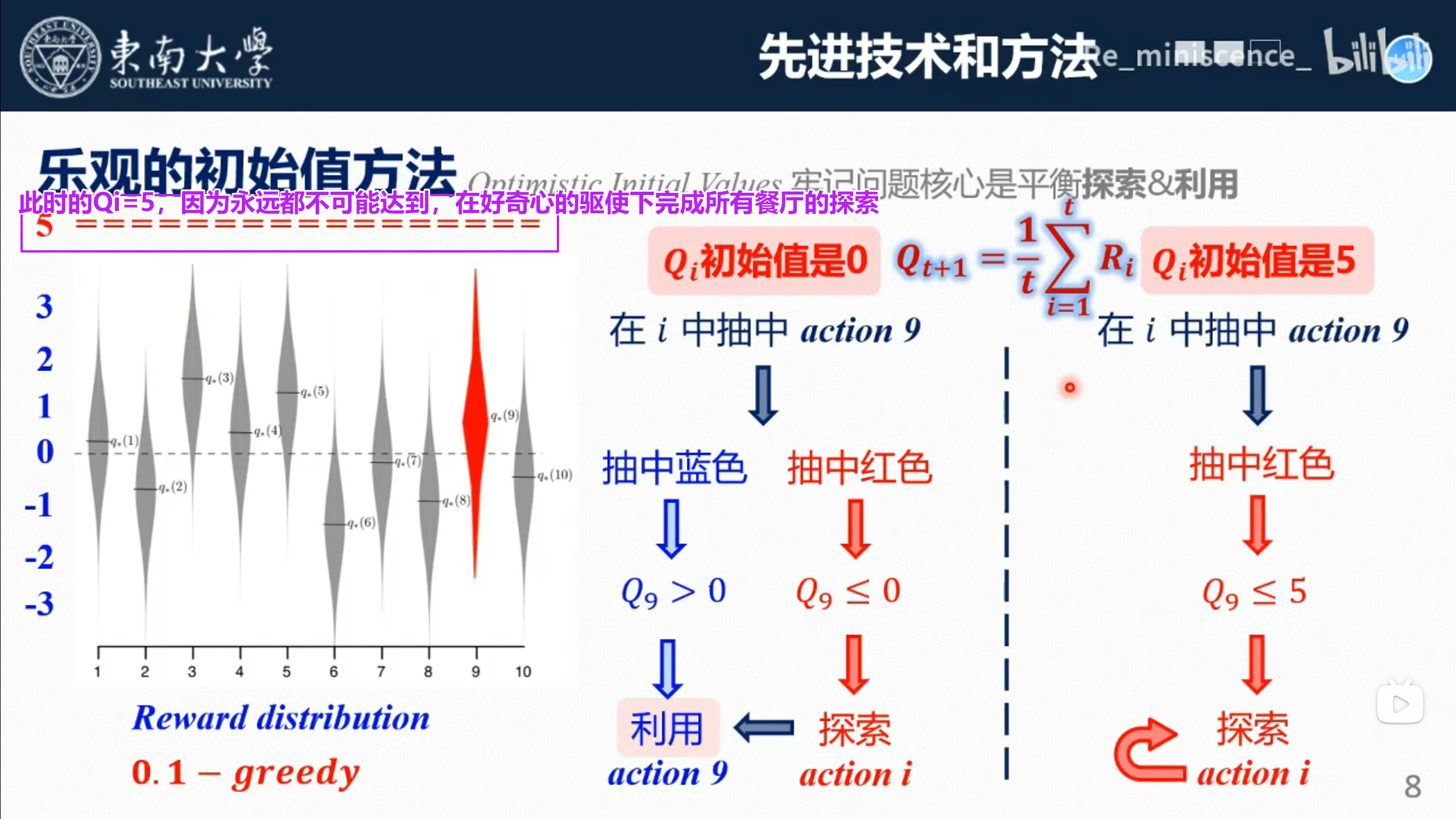
6-探索/利用困境的优化方案1-OIV积极初始值->核心思想:搞一个特别大的理想预期值(这个值可能永远都不能达到)于是在这个较高的心里预期下,就可以用于用于探索完成所有的餐厅试吃找到全局最优解
-
7-探索/利用困境的优化方案2-UCB动作选择->核心思想:在动作选择时,综合考虑动作的估计价值和其不确定性(即该动作被探索的次数)(即让选择次数少的餐厅Qi值更大一点【心里预期更高,认为这家店可能还有好活】,这样留够足够的好奇心再次进行探索)
-
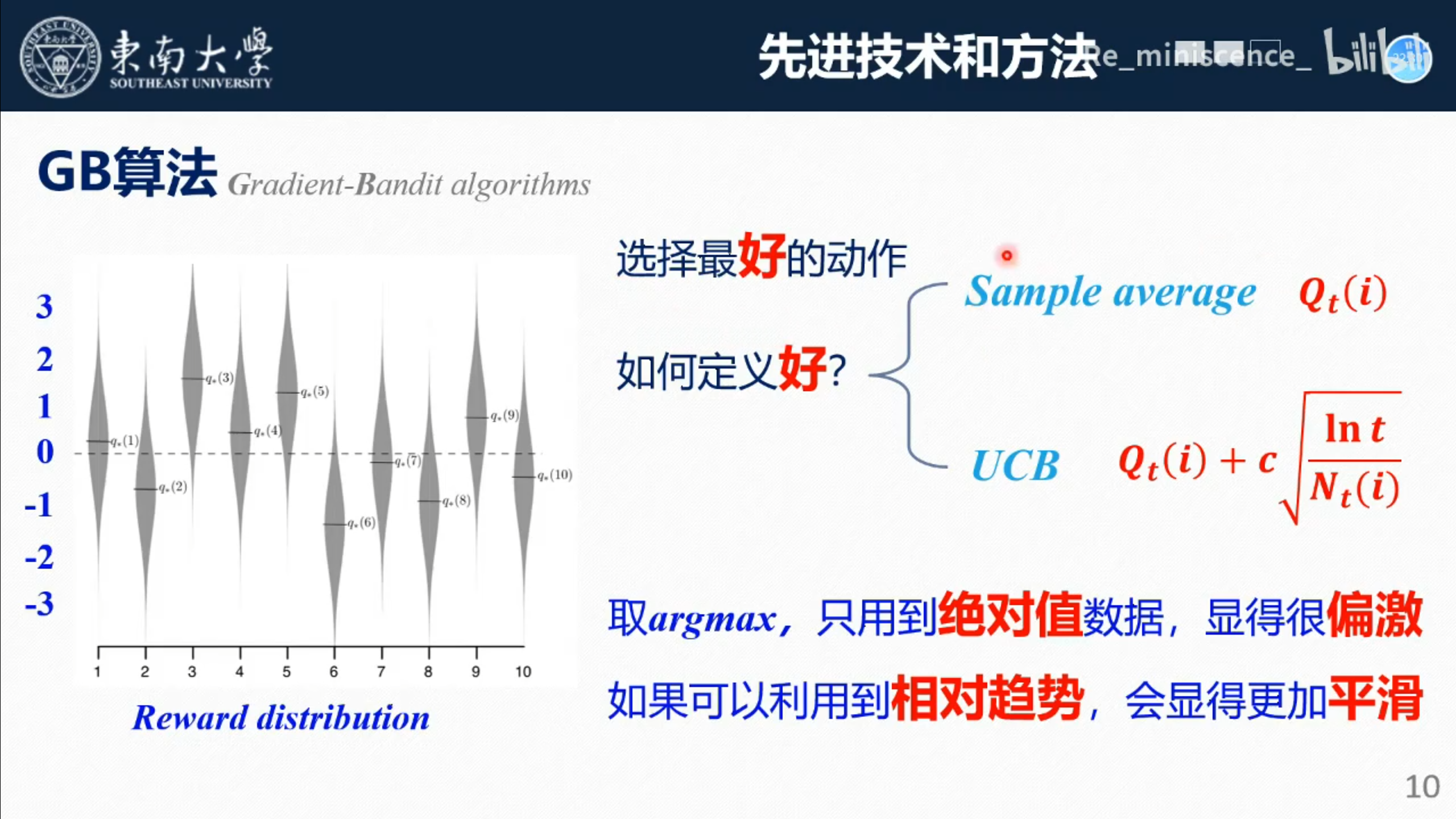
8-探索/利用困境的优化方案3-GB梯度赌博算法->核心思想:上面的算法都是计算每家餐厅的价值收益值,每家餐厅之间的价值收益不互相影响,计算完每家的价值估计之后,再进行动作选择;GB梯度赌博算法->抛弃价值估计,转向概率优化。直接把【每家餐厅的收益】结合【动作偏好函数】进行计算,计算下一步的决策动作
-
9-【OIV积极初始值】VS【UCB动作选择】->UCB 动作选择和积极初始值这两种解决方案并非互斥,它们也不是简单的演进关系,而是在解决探索 - 利用困境上相互补充、各有侧重
-
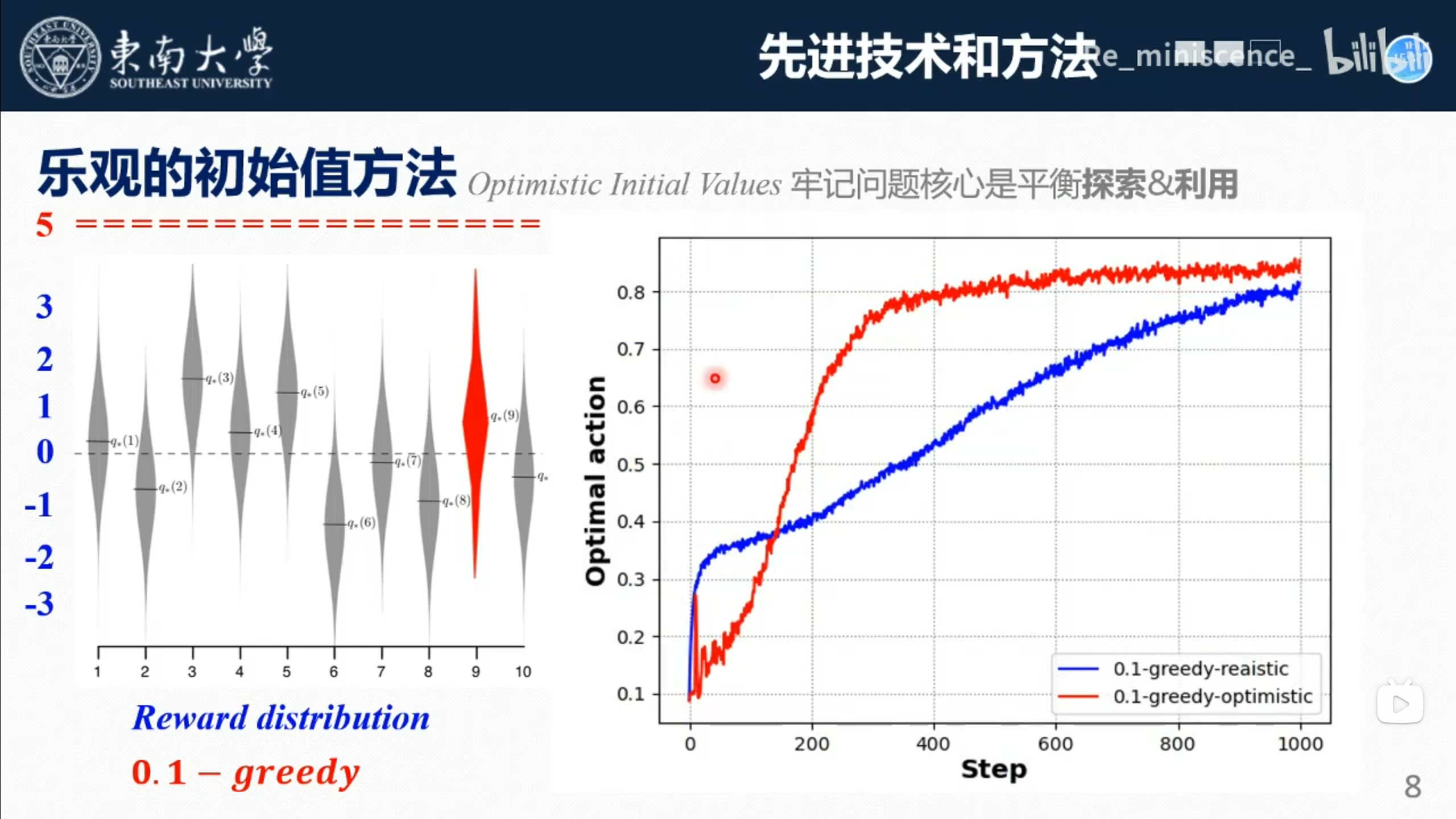
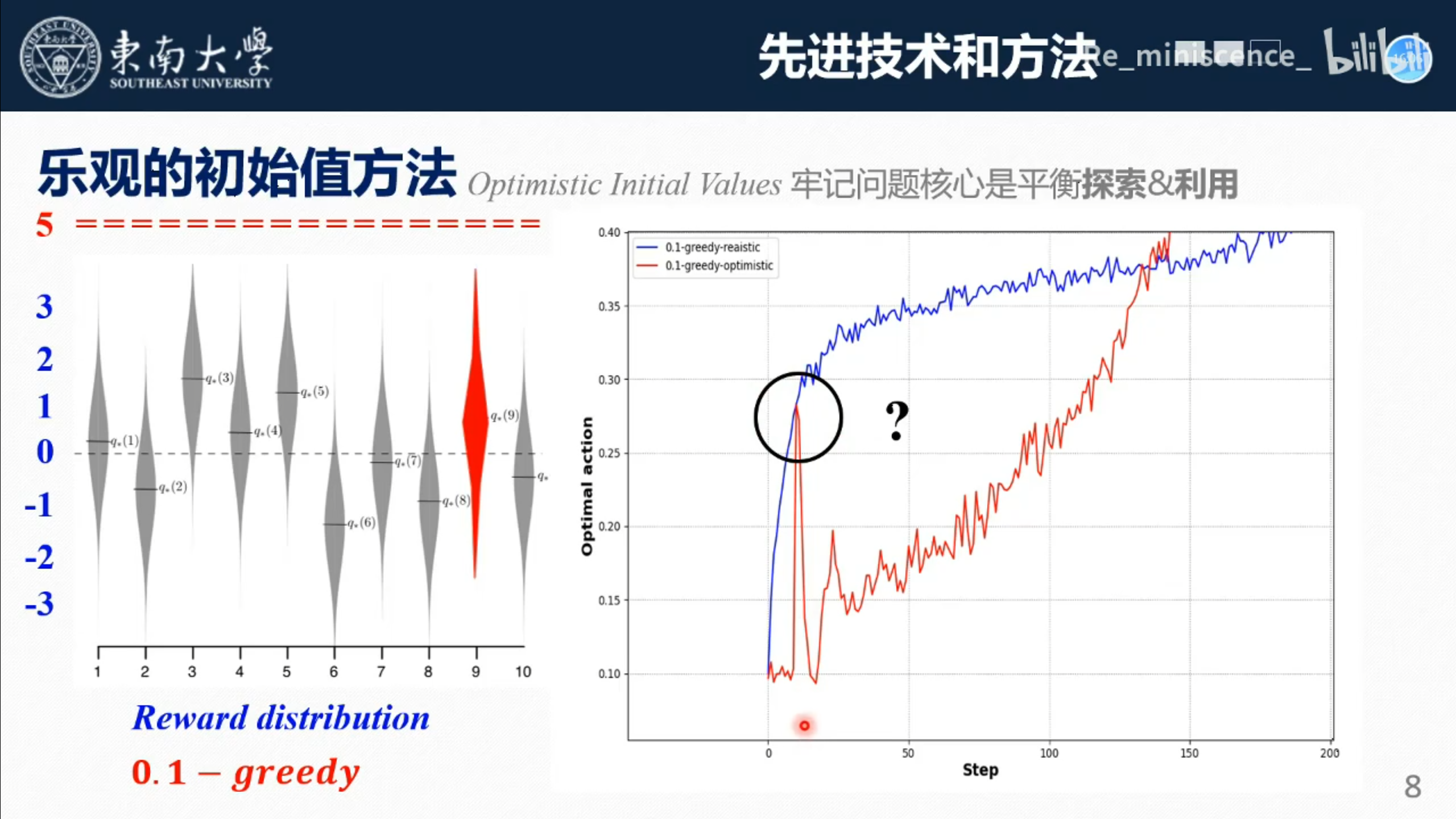
10-OIV积极初始值->为什么会出现一个尖?->前面的所有过程都是在进行探索【波动很大,中间可能遇到最美味的餐厅,这个尖就是那个最佳餐厅】,一旦完成所有的探索后续,模型就会大概的了解到所有餐厅的大概情况Qk,后序就会慢慢的收敛->所以在完成所有的探索之前,曲线会波动很大,后续就会慢慢收敛
3-相关截图
1-K臂老虎机题的简化计算
2-最大收益案例
由于【算力有限/尝试次数】有限引出【探索/利用困境】
3-探索/利用困境
4-探索/利用求解方案1-温和贪婪
【温和贪婪】对比【贪婪】前面的计算过程都相同,但是在后续进行使用的时候,【贪婪】是只选择第i个选项,而【温和贪婪】还会对其他选项进行尝试
1-先拟定一个P(进行探索的概率),则(1-P)是进行利用的概率
2-然后按照哦这个拟定的概率P进行实验->计算出该探索概率下的最大收益
5-探索/利用求解方案1-温和贪婪针对不同ε的绘图
6-探索/利用优化方案1-积极的初始值方法OIV
积极的初始值方法OIV(Optimistic Initial Values),核心思想:搞一个特别大的理想预期值(这个值可能永远都不能达到)于是在这个较高的心里预期下,就可以用于用于探索完成所有的餐厅试吃找到全局最优解

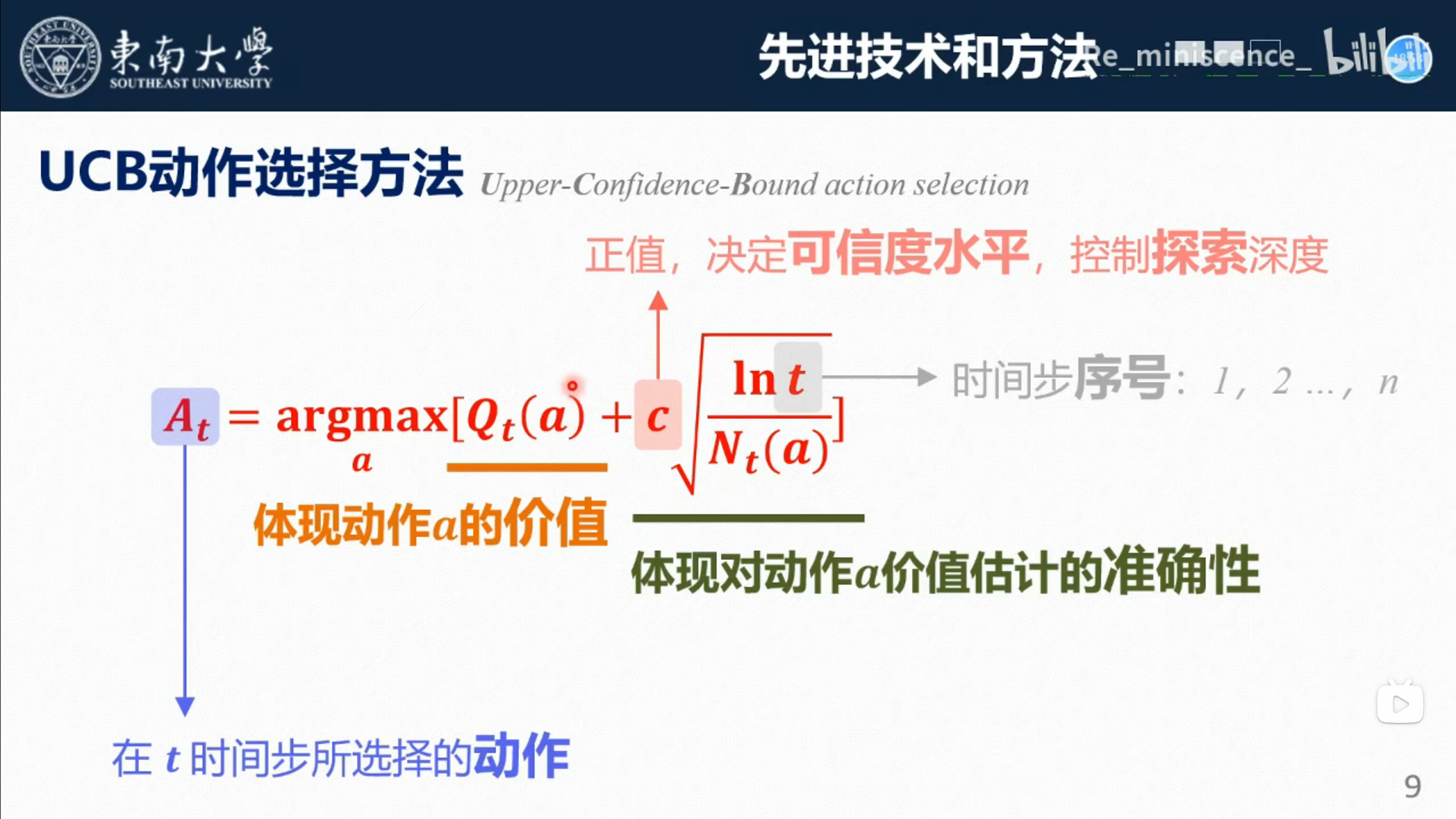
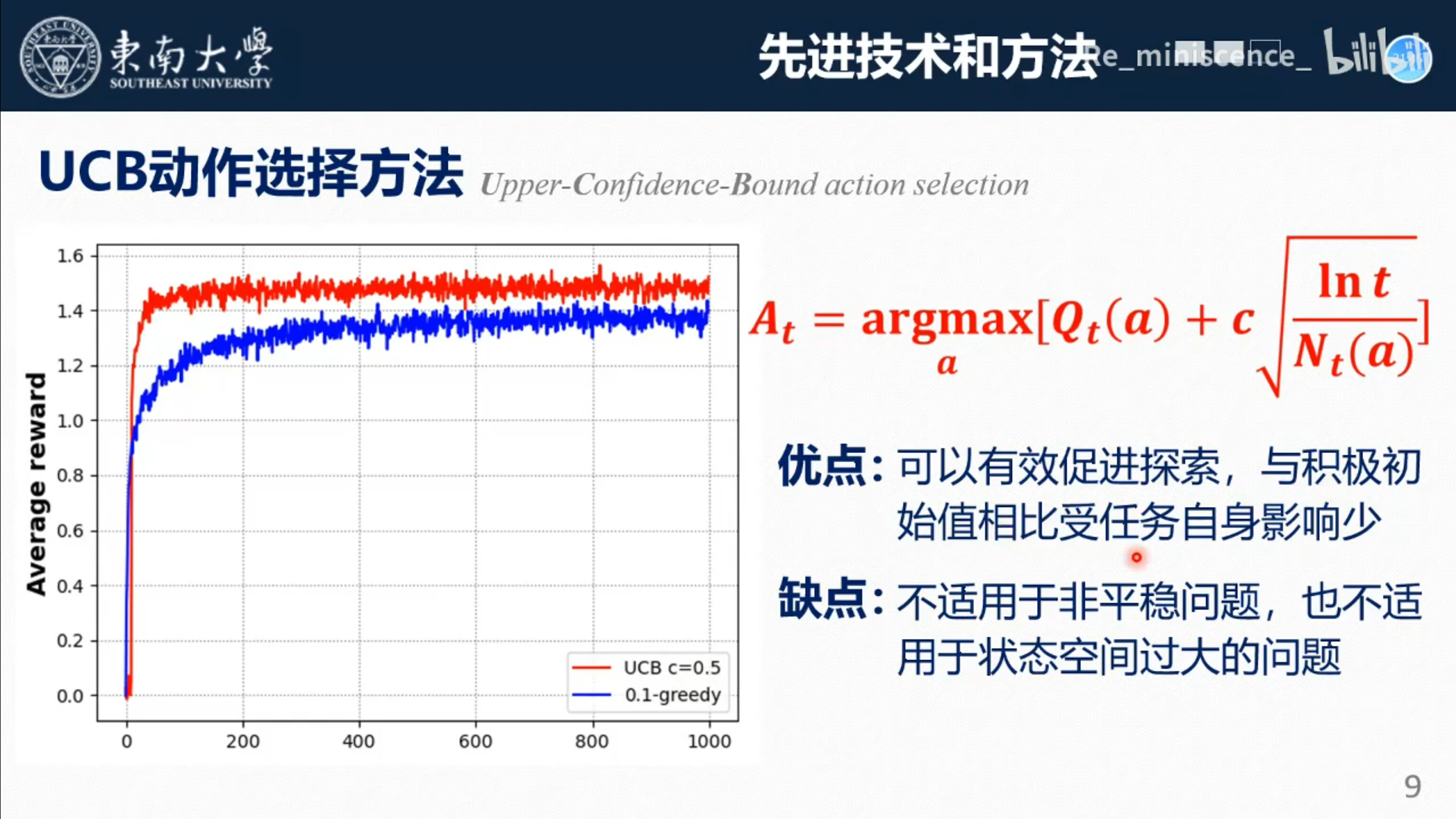
7-探索/利用优化方案2-UCB动作选择方法
在动作选择时,综合考虑动作的估计价值和其不确定性(即该动作被探索的次数)(即让选择次数少的餐厅Qi值更大一点【心里预期更高,认为这家店可能还有好活】,这样留够足够的好奇心再次进行探索)
8-探索/利用优化方案3-GB梯度赌博算法
4-知识整理
1-K臂老虎机问题的生活案例1
以下以在美食广场选择餐厅就餐为例,详细说明强化学习中探索/利用求解方案里贪婪算法的运用过程。
1-场景设定
你身处一个大型美食广场,这里有 10 家不同的餐厅,分别提供不同类型的美食,比如中餐、西餐、快餐等。你每周都会来这个美食广场吃一次饭,目的是找到让自己最满意(即获得最高享受和满足感)的餐厅。
2-算法初始化
在最初阶段,你对这 10 家餐厅一无所知,所以给每家餐厅的初始评分(即估计价值 Q Q Q )都设为 0。每次选择餐厅就餐后,你会根据实际体验给该餐厅一个评分,范围是 0 - 10 分。同时,你设定了一个探索概率 ϵ \epsilon ϵ ,假设初始值为 0.2。
3-探索与利用过程
第 1 周
- 决策依据:由于刚开始,所有餐厅的评分都是 0,按照贪婪算法的逻辑,如果单纯依据评分选择,任意一家餐厅的价值都是一样的。但因为有 0.2 的探索概率,所以这次选择餐厅是完全随机的。假设你随机选择了餐厅 A。
- 体验与更新:就餐后,你根据体验给餐厅 A 打了 7 分,此时餐厅 A 的评分更新为 7 分,其他餐厅评分仍为 0 分。
第 2 周
- 决策依据:现在要决定去哪家餐厅。这时候会根据探索概率 ϵ \epsilon ϵ 来做决策。通过随机数生成器生成一个 0 - 1 之间的随机数,如果这个随机数小于 0.2,就进行探索,随机选择一家餐厅;如果大于 0.2,就进行利用,选择当前评分最高的餐厅。假设生成的随机数是 0.3,大于 0.2,所以你选择利用,去了评分最高的餐厅 A。
- 体验与更新:这次在餐厅 A 的体验一般,你给它打了 4 分。然后更新餐厅 A 的评分,采用加权平均的方式(假设之前去了 1 次,这次是第 2 次),新评分 Q ( A ) = 7 × 1 + 4 × 1 1 + 1 = 5.5 Q(A)=\frac{7\times1 + 4\times1}{1 + 1}=5.5 Q(A)=1+17×1+4×1=5.5 分,其他餐厅评分依旧为 0 分。
第 3 周
- 决策依据:再次生成随机数,假设这次生成的随机数是 0.1,小于 0.2,所以进行探索。你随机选择了餐厅 B。
- 体验与更新:在餐厅 B 用餐后,你觉得非常满意,给它打了 9 分。此时餐厅 B 的评分更新为 9 分,餐厅 A 评分是 5.5 分,其他餐厅评分还是 0 分。
第 4 周
- 决策依据:又到了选择餐厅的时候,生成随机数,假设为 0.8,大于 0.2,进行利用,所以你选择了当前评分最高的餐厅 B。
- 体验与更新:这次在餐厅 B 的体验依然不错,你给它打了 8 分。更新餐厅 B 的评分, Q ( B ) = 9 × 1 + 8 × 1 1 + 1 = 8.5 Q(B)=\frac{9\times1 + 8\times1}{1 + 1}=8.5 Q(B)=1+19×1+8×1=8.5 分,餐厅 A 评分 5.5 分,其他餐厅评分 0 分。
4-探索概率调整
随着时间推移,你对这些餐厅的了解越来越多。为了更倾向于选择已经发现的优质餐厅,你逐渐降低探索概率 ϵ \epsilon ϵ 。比如到第 10 周时,把 ϵ \epsilon ϵ 降低到 0.1。这样一来,大部分情况下你会选择评分最高的餐厅,但仍有一定机会去尝试其他餐厅,以应对餐厅质量可能发生的变化。
5-长期结果
经过一段时间的尝试,你可能会发现某几家餐厅的评分一直比较高,比如餐厅 B 和餐厅 C。之后大部分时间你会选择这两家评分高的餐厅就餐(利用),但偶尔也会因为探索概率的存在,去尝试其他餐厅,看看是否有更好的选择。
通过这个案例可以看到,贪婪算法结合探索概率,帮助你在寻找最满意餐厅的过程中,平衡了对已知优质餐厅的利用和对未知餐厅的探索。
2-K臂老虎机问题的生活案例2
好的,我们来用一个非常贴近生活的真实案例—— “上班族小王每天选择午餐餐厅的决策过程” ——来详细说明 ε-贪婪算法在探索与利用中的应用。
1-背景设定
- 智能体 (Agent): 小王
- 环境 (Environment): 公司附近午餐餐厅的集合(比如:餐厅A、B、C、D)
- 状态 (State): 每天午餐时间(为了简化,我们假设每天状态相同,只关注动作选择)
- 动作 (Action): 选择去哪家餐厅吃饭(A、B、C、D)
- 奖励 (Reward): 小王的用餐满意度。我们可以量化它,比如:
- 非常满意: +3分 (好吃、快、便宜)
- 一般满意: +1分 (能吃,但没亮点)
- 不满意: -1分 (难吃、等太久、太贵)
- 极度不满: -3分 (食物中毒、天价账单)
- 目标: 长期最大化午餐满意度(总奖励)。
- 挑战: 小王最初不知道每家餐厅的真实质量(平均奖励)。他需要尝试(探索)不同的餐厅来了解它们,同时也要尽量选择已知好的餐厅(利用)来保证大部分时间的满意度。
小王采用 ε-贪婪策略:
- 小王设定一个探索概率 ε(比如 ε = 0.3)。
- 小王维护一个Q值表 (Q-Table),记录他对每家餐厅当前估计的平均满意度。初始时,所有Q值都为0(或一个中性值),表示一无所知。
餐厅 Q值 (估计平均满意度) A 0 B 0 C 0 D 0
2-背景设定决策过程模拟 (ε = 0.3):
-
Day 1:
-
决策: 生成一个随机数(0-1之间)。0.5 > ε (0.3) ➔ 利用 (Exploit)。但所有Q值都是0(没有“已知最好”)。这时通常默认随机选一个(这也算一种初始探索)。假设小王随机选了餐厅A。
-
体验: 排队很长,味道一般。小王打分:+1。
-
更新Q值: 更新餐厅A的Q值。假设学习率 α = 0.5 (表示新经验的重要性)。
新Q(A) = 老Q(A) + α * (奖励 - 老Q(A)) = 0 + 0.5 * (1 - 0) = 0.5
-
Q表更新后:
餐厅 Q值 A 0.5 B 0.0 C 0.0
| D | 0.0 |
-
-
Day 2:
-
决策: 随机数 = 0.2 < ε (0.3) ➔ 探索 (Explore)!小王随机选择了餐厅C(之前没去过)。
-
体验: 出乎意料的好吃!速度快,价格实惠。小王打分:+3。
-
更新Q值:
新Q(C) = 0 + 0.5 * (3 - 0) = 1.5
-
Q表更新后:
餐厅 Q值 A 0.5 B 0.0 C 1.5
| D | 0.0 |
-
-
Day 3:
-
决策: 随机数 = 0.7 > ε (0.3) ➔ 利用 (Exploit)!选择当前Q值最高的餐厅 ➔ 餐厅C (Q=1.5)。
-
体验: 依然不错,但感觉没昨天惊艳了(可能厨师发挥小波动)。小王打分:+2。
-
更新Q值:
新Q(C) = 1.5 + 0.5 * (2 - 1.5) = 1.5 + 0.5 * 0.5 = 1.5 + 0.25 = 1.75
-
Q表更新后:
餐厅 Q值 A 0.5 B 0.0 C 1.75
| D | 0.0 |
-
-
Day 4:
-
决策: 随机数 = 0.4 > ε (0.3) ➔ 利用 (Exploit)!选择当前Q值最高的餐厅 ➔ 餐厅C (Q=1.75)。
-
体验: 人太多,等位太久,影响了心情。食物尚可。小王打分:+1。
-
更新Q值:
新Q(C) = 1.75 + 0.5 * (1 - 1.75) = 1.75 + 0.5 * (-0.75) = 1.75 - 0.375 = 1.375
-
Q表更新后:
餐厅 Q值 A 0.5 B 0.0 C 1.375
| D | 0.0 |
-
-
Day 5:
-
决策: 随机数 = 0.1 < ε (0.3) ➔ 探索 (Explore)!小王随机选择了餐厅B。
-
体验: 非常糟糕,又贵又难吃,还等了很久。小王打分:-3。
-
更新Q值:
新Q(B) = 0 + 0.5 * (-3 - 0) = -1.5
-
Q表更新后:
餐厅 Q值 A 0.5 B -1.5 C 1.375
| D | 0.0 |
-
-
Day 6:
-
决策: 随机数 = 0.8 > ε (0.3) ➔ 利用 (Exploit)!选择当前Q值最高的餐厅 ➔ 餐厅C (Q=1.375)。
-
体验: 恢复正常水平,好吃快捷。小王打分:+3。
-
更新Q值:
新Q(C) = 1.375 + 0.5 * (3 - 1.375) = 1.375 + 0.5 * 1.625 = 1.375 + 0.8125 = 2.1875
-
Q表更新后:
餐厅 Q值 A 0.5 B -1.5 C 2.1875 D 0.0
-
3-过程分析 (固定 ε=0.3):
- 利用 (Exploit - 70% 概率): 大部分时间(Day 3, 4, 6),小王会选择当前他认为最好的餐厅C(因为C的Q值一直领先)。这保证了他大部分时间能获得相对不错的满意度(+2, +1, +3),尤其是在C表现稳定后。
- 探索 (Explore - 30% 概率): 小部分时间(Day 2, 5),小王会随机尝试其他餐厅。
- 成功探索 (Day 2): 发现了非常棒的餐厅C!这是策略的巨大成功,找到了最优选项。C的Q值被大幅提升,之后成为主要利用对象。
- 失败探索 (Day 5): 踩雷了餐厅B。虽然这次体验极差(-3),但获得了宝贵信息:知道了B是雷区,以后可以避免。B的Q值被大幅降低。
- 信息获取与更新: 无论探索还是利用,每次就餐后小王都会根据实际满意度(奖励)更新他对该餐厅的评估(Q值)。这使他对餐厅质量的估计越来越准确(A一般,B很差,C很好,D未知)。
- 未探索选项: 餐厅D到目前为止还没有被探索过(纯属随机没选到)。只要ε>0,在未来的日子里,小王仍有小概率去尝试D,从而可能发现新的好餐厅(或者又一个雷)。
4-ε 衰减的引入 (优化策略):
小王很快发现了一个问题:随着时间推移,他已经基本确定了C是最好的(Q值最高),A一般,B很差。但按照固定ε=0.3的策略,他仍然有30%的概率去随机尝试A、B、D。尝试A或D可能还行(A已知一般,D未知),但尝试已知很差的B显然是浪费钱和心情!而且,他对C已经很有信心了,不需要那么频繁地探索了。
解决方案:ε 衰减
- 初始设定: 小王设定初始 ε₀ = 0.9(早期极度需要探索),衰减因子 γ = 0.95(每次决策后ε乘以0.95),下限 ε_min = 0.1。
- 衰减过程:
- Day 1: ε = 0.9 (高探索)
- Day 2: ε = 0.9 * 0.95 = 0.855
- Day 3: ε = 0.855 * 0.95 ≈ 0.812
- Day 4: ε ≈ 0.812 * 0.95 ≈ 0.771
- Day 5: ε ≈ 0.771 * 0.95 ≈ 0.732
- Day 6: ε ≈ 0.732 * 0.95 ≈ 0.695
- … (继续衰减)
- 假设到 Day 30:ε ≈ 0.9 * (0.95)^29 ≈ 0.1 (达到下限,之后稳定在0.1)
ε 衰减带来的好处:
- 早期 (高 ε): 前几周,小王疯狂探索各种餐厅(包括D)。这让他快速发现了潜在的宝藏餐厅(如C)和雷区(如B),并初步建立起对A的评价。信息收集效率高。
- 中期 (ε下降): 随着Q值逐渐稳定(C最好,A次之,B最差,D未知但尝试过几次可能一般),小王探索的频率逐渐降低。他更多地去C享受美食(利用),只在偶尔(ε变小)时去尝试一下D(唯一未充分了解的)或者再验证下A。避免了频繁踩雷B。
- 后期 (低 ε): 几个月后,ε稳定在0.1。小王绝大部分时间 (90%) 都在最好的餐厅C吃饭(最大化利用已知最优解)。极少时间 (10%) 会随机尝试一下其他餐厅(主要是为了防止餐厅C质量突然下滑,或者新开了一家更好的餐厅E——虽然这个简单模型没考虑环境变化)。几乎完全避免了去已知很差的B。
5-总结
通过小王选餐厅的案例,我们清晰地看到了 ε-贪婪算法如何工作:
- 核心循环: 在每个决策点(每天),基于当前探索概率ε和Q值表,选择动作(去哪吃)-> 获得奖励(用餐体验)-> 更新Q值(调整对该餐厅的评价)。
- 探索 (ε概率): 随机尝试,旨在发现未知信息(新好餐厅或确认雷区)。案例中:发现C(成功),踩雷B(失败但有价值),尚未尝试D(未知)。
- 利用 (1-ε概率): 选择当前已知最好的选项,旨在获得稳定收益。案例中:大部分时间选择高Q值的C。
- ε衰减 (优化关键): 模拟了人的学习过程——早期广撒网(高探索),后期专注于已知最好的(高利用)。解决了固定ε导致的后期过度探索问题(比如一直有30%概率去吃已知很差的B)。
- Q值学习: 不断用实际体验修正对每个动作(餐厅)价值的估计,是决策的基础。
ε-贪婪策略(尤其是带衰减的)提供了一种简单有效的方法,在信息不完全的环境下,平衡尝试新事物获取信息(探索) 和选择已知最优解获取收益(利用) 的矛盾,最终目标是最大化长期收益(午餐总满意度)。
3-计算的结果和ε的取值有没有关系,如何和ε的取值有关,那如何进行算法优化
1-4o-Mini回答
在上述美食广场选择餐厅的案例所涉及的强化学习探索/利用问题中,计算结果与 ϵ \epsilon ϵ 的取值密切相关,以下为你详细分析关系以及对应的算法优化方法。
计算结果与 ϵ \epsilon ϵ 取值的关系
高 ϵ \epsilon ϵ 值(接近 1)
- 探索性强:当 ϵ \epsilon ϵ 取值接近 1 时,意味着大部分情况下会进行随机探索。在美食广场的例子中,你会频繁地随机选择不同的餐厅就餐。这样做能快速收集到大量关于各个餐厅的信息,但可能导致你不断尝试新餐厅,而没有充分利用已经发现的优质餐厅。
- 结果影响:前期可能会得到各种不同的体验评分,各个餐厅的评分更新较为频繁。但由于很少选择当前评分高的餐厅,可能会在一段时间内无法稳定地获得较高的满意度。例如,你可能多次尝试到体验较差的餐厅,整体满意度波动较大。
低 ϵ \epsilon ϵ 值(接近 0)
- 利用性强:如果 ϵ \epsilon ϵ 取值接近 0,那么绝大部分时间都会选择当前评分最高的餐厅。在美食广场场景下,你会很快固定在某一家或几家评分高的餐厅就餐。
- 结果影响:前期如果过早地确定了“最佳”餐厅,可能会错过其他真正更优质的餐厅,陷入局部最优。因为缺乏对其他餐厅的探索,当这家“最佳”餐厅的质量发生变化(如更换厨师导致菜品质量下降)时,你可能无法及时发现更好的替代餐厅,从而导致长期满意度逐渐降低。
算法优化方法
动态调整 ϵ \epsilon ϵ 值
- 衰减策略:随着学习过程的推进,逐渐降低 ϵ \epsilon ϵ 值。在美食广场的例子中,刚开始你对所有餐厅都不了解,需要较多的探索,所以可以将 ϵ \epsilon ϵ 设为较高的值(如 0.8)。随着尝试的餐厅数量增多,对各餐厅的了解逐渐加深,就可以逐渐降低 ϵ \epsilon ϵ 值。例如,每尝试 10 次后,将 ϵ \epsilon ϵ 降低 0.1,直到 ϵ \epsilon ϵ 达到一个较低的稳定值(如 0.1)。这样既能保证前期有足够的探索,又能在后期充分利用已经发现的优质餐厅。
- 基于时间或经验的调整:除了简单的线性衰减,还可以根据具体的学习进度或经验进行更复杂的调整。比如,当你发现某个餐厅的评分明显高于其他餐厅,且已经尝试了一定次数后,就可以快速降低 ϵ \epsilon ϵ 值,更倾向于利用这个优质餐厅。
基于置信区间的选择
- UCB 算法:UCB(Upper Confidence Bound)算法是一种改进的贪婪算法,它不仅考虑动作的估计价值,还考虑了估计的不确定性。在美食广场的例子中,对于每家餐厅,除了记录其平均评分,还会记录尝试的次数。UCB 算法会选择具有最高置信上界的餐厅,置信上界综合考虑了平均评分和尝试次数。尝试次数少的餐厅,其置信上界会相对较高,这样就会促使算法在前期对更多餐厅进行探索,同时在后期逐渐倾向于选择评分高且尝试次数多的餐厅。
- Thompson 采样:这是另一种基于概率的探索方法。对于每个餐厅,根据其历史评分构建一个概率分布。在选择餐厅时,从每个餐厅的概率分布中采样得到一个值,选择采样值最大的餐厅。随着尝试次数的增加,概率分布会逐渐收敛,从而实现探索和利用的平衡。
多策略融合
- 可以将贪婪算法与其他探索策略结合使用。例如,在前期使用完全随机探索( ϵ = 1 \epsilon = 1 ϵ=1)快速了解各个餐厅的大致情况,然后切换到 ϵ \epsilon ϵ-贪婪算法进行更有针对性的探索和利用。或者在不同的时间段采用不同的 ϵ \epsilon ϵ 策略,如工作日和周末采用不同的 ϵ \epsilon ϵ 值,因为不同时间段餐厅的服务质量和菜品可能会有所不同。
2-KIMI回答
在强化学习的探索/利用问题中,计算结果与ε的取值密切相关。调整ε策略可以优化算法性能,以下是详细分析:
不同ε取值对结果的影响
- ε取值较大时:智能体更倾向于探索,会更多地尝试新的动作,从而有机会发现潜在的更高奖励。但过多的探索可能导致智能体在已知的较优动作上花费较少时间,从而在短期内错过获得更高累积奖励的机会。
- ε取值较小时:智能体更倾向于利用已有的知识选择当前看来最优的动作,这样可以更快地获得较高的累积奖励。但过小的ε可能导致体智能过早地收敛到一个局部最优解,而错过全局最优解。
如何与ε的取值有关
- 初始阶段:在问题的初始阶段,智能体对环境了解较少,较大的ε值有助于快速收集关于不同动作的信息,从而更快地建立对环境的初步认识。
- 学习过程中:随着智能体对环境的了解逐渐加深,可以适当减小ε值,减少探索的频率,更多地利用已有的知识来获得较高的奖励。
- 环境变化:如果环境是动态变化的,即奖励结构可能会随时间发生改变,那么需要保持一定的ε值来持续探索,以便适应环境的变化。
算法优化方法
- 动态调整ε值:一种常见的方法是让ε值随着时间逐渐减小。例如,可以采用线性衰减、指数衰减等方式。初始时设置较大的ε值进行充分的探索,随着学习的进行,逐渐减小ε值,使智能体逐渐从探索转向利用。
- 基于状态或上下文调整ε值:根据当前的状态或上下文信息来动态调整ε值。在某些状态下,可能需要更多的探索,而在其他状态下则可以更多地利用已有的知识。
- 结合其他探索策略:除了ε-贪婪策略外,还可以结合其他探索策略,如 optimism in the face of uncertainty 或 Thompson sampling 等,以更有效地平衡探索与利用。
- 利用先验知识或经验:如果有关于问题的先验知识或经验,可以根据这些信息来调整ε值。例如,在已知某些区域奖励较高的情况下,可以适当降低这些区域的ε值,减少不必要的探索。
- 多智能体协作:在多智能体系统中,智能体之间可以共享探索信息,从而减少每个智能体的探索负担,提高整体的学习效率。
3-DeepSeek回答
好的,我们来深入探讨计算结果与ε取值的关系以及如何进行算法优化,并继续使用“小王选餐厅”的案例来说明。
核心结论:计算结果(性能)与ε的取值密切相关,且这种关系是非线性的、环境依赖的。
1. ε取值如何影响计算结果(性能)?
在“小王选餐厅”的案例中,ε代表了小王随机探索新餐厅(而不是去当前已知最好的餐厅C)的概率。ε的不同取值会导致截然不同的长期结果:
-
ε 过大(例如 ε = 0.8):
- 优点: 探索非常充分。小王很快就能尝试完所有餐厅(A, B, C, D),快速发现最优餐厅C的可能性很高。也能很快确认雷区B。
- 缺点: 利用严重不足。即使小王已经知道C是最好的,他仍然有80%的概率不去C,而是随机选其他餐厅(包括已知很差的B!)。这导致:
- 大量低质量午餐: 频繁吃到B(-3分)和可能一般的A、D。
- 平均收益低: 长期累积的满意度(总奖励)会很低,因为他浪费了太多机会在次优或极差的选择上。
- 结果: 收敛速度快(找到最优解C快),但最终性能差(平均奖励低)。像一个“好奇心过重但不会专注”的人。
-
ε 过小(例如 ε = 0.01):
- 优点: 利用非常充分。一旦小王“偶然”发现了餐厅C(比如在早期某次极小的探索概率下),他几乎(99%的时间)都会去C吃饭,获得稳定的高满意度(+2或+3)。
- 缺点: 探索严重不足。
- 可能错过最优解: 如果早期随机探索没选中C,而是先选中了A(一般)或B(很差),小王会过早地锁定在这些次优或极差的选择上(因为Q(A)或Q(B)会先被更新为正值或“不那么负”,而其他餐厅Q值还是0)。他可能永远发现不了真正最好的餐厅C。
- 对次优解过于执着: 即使锁定在A(一般)上,他也几乎不会去尝试C或D。
- 结果: 最终性能可能高(如果幸运地早期找到C),但也可能很低(如果锁定在B或A)。收敛速度慢且不稳定(找到最优解C需要极长的时间,甚至永远找不到)。像一个“极其保守,拒绝尝试新事物”的人。
-
ε 适中(例如 ε = 0.1 或 使用衰减策略):
- 目标: 在早期进行足够的探索以大概率发现最优解C并识别雷区B,同时在后期进行充分的利用以最大化在C就餐的次数。
- 结果: 平衡了探索与利用。最终性能高(平均奖励接近最优),收敛速度相对较快且稳定。像一个“既愿意尝试新事物,又懂得专注在好事物上”的聪明人。
总结ε对结果的影响:
- 收敛速度(找到最优解的速度): 通常随着ε增大而加快(探索更多,更快发现所有选项)。
- 渐近性能(长期平均奖励): 存在一个最优的ε范围。过大或过小的ε都会导致渐近性能下降。
- 稳定性(找到最优解的概率): 过小的ε可能导致永远找不到最优解(锁定在次优解),稳定性差。适中的ε稳定性好。
- 环境依赖性: 最优的ε值强烈依赖于具体环境:
- 动作数量: 餐厅越多(可选动作越多),通常需要更大的ε(或更高的初始ε)来保证充分探索。
- 奖励方差/噪声: 同一家餐厅满意度波动越大(奖励噪声大),可能需要更大的ε来持续验证Q值的准确性。
- 次优动作的惩罚: 像餐厅B这种极差选项(负奖励大且稳定)的存在,使得过大的ε代价高昂,需要更谨慎(更小的ε或更快的衰减)。
- 最优动作的优势: 餐厅C比A好很多(最优动作优势明显),则适度的探索就能带来巨大收益,ε可以相对小些。
- 环境是否平稳: 如果餐厅质量会随时间变化(非平稳环境),则需要持续不断的探索(ε不能衰减到0) 来跟踪变化。
2. 如何进行算法优化?(解决对ε的依赖问题)
既然ε的选择如此关键又如此困难(需要针对不同环境调整),研究者开发了多种优化方法,核心思想是减少对固定ε的依赖或让ε动态适应学习过程:
优化方法1:ε衰减 (ε-Decay)
- 核心思想: 在学习初期使用较高的ε(ε₀) 促进充分探索,快速获取环境信息。随着时间推移(训练步数/回合数增加),逐渐降低ε 到一个较小的下限值(ε_min),增加利用的比例。
- 常用衰减方式:
- 线性衰减:
ε = max(ε_min, ε₀ - slope * t)(t 是时间步) - 指数衰减:
ε = max(ε_min, ε₀ * decay_rate^t) - 逆时间衰减:
ε = max(ε_min, ε₀ / t)或ε = max(ε_min, ε₀ / (1 + decay_factor * t))
- 线性衰减:
- 在餐厅案例中的优化:
- 早期(前几周):ε=0.9 -> 疯狂尝试所有餐厅,快速发现C是好餐厅,B是雷区。
- 中期(几周后):ε逐渐降到0.3 -> 主要去C,偶尔再试试D或验证A。
- 后期(几个月后):ε稳定在0.1 -> 几乎只去C(利用),极少(10%)随机尝试一下(防止错过变化或新店)。
- 优点: 简单有效,显著缓解了固定ε的缺点(早期探索不足,后期利用不足)。是实践中最常用、成本最低的优化方法。
- 缺点: 衰减率和初始/最终值仍是需要设定的超参数。衰减可能不够智能(比如某个动作探索得还不够充分,但ε已经降得很低了)。
优化方法2:自适应ε (Adaptive ε) / 基于不确定性的探索
- 核心思想: 不再固定或按预定计划衰减ε,而是根据智能体当前学习的状态动态调整ε。一个常见依据是动作的不确定性(Uncertainty)。
- 简单实现思路(示例):
- 记录每个动作(餐厅)被选择的次数
N(a)。 - 定义不确定性:
U(a) = 1 / sqrt(N(a) + 1)。尝试次数越少的动作,不确定性越大。 - 设定一个总体的不确定性阈值(U_threshold) 或 基准不确定性。
- 如果平均不确定性或 最大不确定性 高于阈值,则增加ε(需要更多探索来降低不确定性)。反之则降低ε(可以利用了)。
- 记录每个动作(餐厅)被选择的次数
- 在餐厅案例中的可能表现:
- 初期:所有
N(a)=0,U(a)都很大 -> ε很高,充分探索。 - 发现C很好 (
N(C)增加快,U(C)降低快),但D从未去过 (U(D)仍然很高) -> ε保持中等,鼓励去探索D。 - 尝试过D后 (
N(D)>0),如果D一般 (U(D)降低),且其他餐厅不确定性都较低 -> ε降低到很小。 - 如果某个餐厅的满意度突然波动很大(比如C某天得了-1分),可能临时增加一点ε,再去C多试几次确认。
- 初期:所有
- 优点: 更智能地将探索资源分配给信息价值最高的动作(尝试次数少、奖励波动大的动作),理论上比固定衰减更高效。
- 缺点: 实现更复杂,需要维护额外信息(如计数、不确定性估计),引入新的超参数(如不确定性阈值、调整规则)。
优化方法3:完全避免ε:基于置信度的探索策略
- 核心思想: 放弃ε-贪婪框架,采用不依赖探索概率参数ε的策略,直接在动作选择中显式地平衡价值估计和不确定性估计。
- 代表算法:
- UCB (Upper Confidence Bound): 选择具有最高上置信界的动作:
UCB(a) = Q(a) + c * sqrt(ln(t) / N(a))。其中:Q(a):当前平均奖励估计(利用)。c:探索强度常数(超参数,但作用不同于ε)。ln(t):总时间步的对数(鼓励探索早期未充分尝试的动作)。N(a):动作a被选择的次数。sqrt(ln(t) / N(a)):对Q(a)估计不确定性的度量(探索)。
- Thompson Sampling (TS): 一种贝叶斯方法。
- 为每个动作a的奖励分布(如伯努利或高斯分布)维护一个后验分布(基于历史观察更新)。
- 每一步,从每个动作a的后验分布中采样一个奖励值
θ_a。 - 选择具有最大采样值θ_a的动作。
- 本质:以当前估计下该动作是最优的概率来选择它。不确定性高的动作,其后验分布方差大,采样值可能更大(被选中的机会更大)。
- UCB (Upper Confidence Bound): 选择具有最高上置信界的动作:
- 在餐厅案例中的优势:
- UCB: 新餐厅D(
N(D)小),其UCB值Q(D) + c * ...会很大(即使Q(D)初始为0),必然在早期被高优先级探索。已知很差的B,其Q(B)负且N(B)大,UCB值会非常低,几乎不会被选中。无需设定ε,探索自然聚焦在潜力大的未知选项上。 - Thompson Sampling: 同样会优先探索尝试次数少(后验方差大)的餐厅D。对于已知很差的B,其后验分布的均值会很负,采样出一个很大值的概率极低,因此几乎不会被选中。
- UCB: 新餐厅D(
- 优点: 通常比ε-贪婪(即使衰减)有更好的理论保证和实际性能。探索更精准高效,自动规避已知差动作。无需手动设置探索概率ε。
- 缺点: 实现比ε-贪婪复杂(尤其是TS需要维护和采样后验分布)。UCB中的
c、TS中的先验分布仍是超参数(但调优相对鲁棒)。计算开销可能略大。
总结:如何优化
- 起点:ε-贪婪 + 衰减: 这是最简单、最常用、最容易实现的优化方法。优先尝试这个! 选择合适的衰减方式和参数(ε₀, ε_min, 衰减率)需要通过实验(网格搜索、随机搜索等)在目标环境上微调。
- 进阶:自适应ε / UCB / Thompson Sampling: 如果ε-贪婪+衰减效果不佳(特别是环境复杂、动作空间大、奖励噪声大、次优动作惩罚高时),或者追求更高性能,可以考虑这些更高级的策略。
- UCB 是一个很好的替代方案,实现相对简单,理论坚实。
- Thompson Sampling 通常在经验上表现最好,尤其适合贝努利奖励(如点击率预估),但实现稍复杂。
- 自适应ε 处于两者之间,可以基于ε-贪婪框架改进。
- 超参数调优: 无论选择哪种策略(包括UCB的
c、TS的先验),都不可避免地需要进行一定程度的超参数优化(Hyperparameter Tuning)。常用方法:- 网格搜索 (Grid Search): 在预设的参数组合中遍历。
- 随机搜索 (Random Search): 在参数空间随机采样点尝试。
- 贝叶斯优化 (Bayesian Optimization): 更智能地选择下一个待评估的参数点,效率更高(尤其当实验成本高时)。
- 评估指标: 优化时要选择合适的评估指标:
- 最终平均奖励 (Average Return): 最重要的指标,反映长期性能。
- 收敛速度 (Learning Curve): 学习到高性能的速度。
- 稳定性 (Variance): 多次运行结果的一致性。
最终结论:
ε的取值对强化学习(尤其是ε-贪婪策略)的性能有决定性影响。一个糟糕的ε会导致智能体要么过于保守(错过最优解),要么过于浪费(在次优/差动作上耗费资源)。算法优化的核心目标就是减轻或消除对固定ε参数的脆弱依赖。 最实用有效的方法是ε衰减。追求更高性能或更智能探索时,可考虑基于置信度的策略(UCB, Thompson Sampling),它们从根本上摒弃了ε参数,通过显式地量化不确定性来指导探索。无论哪种方法,结合超参数调优和严谨的评估都是必不可少的步骤。
4-积极初始值(Optimistic Initial Values, OIV)
积极初始值(Optimistic Initial Values, OIV) 是解决探索/利用困境的一种经典优化方案,其核心思想是通过对价值估计(如 Q 值)设置“乐观”的高初始值,来系统性地驱动早期探索。它巧妙地利用了强化学习算法自身的学习机制,无需显式的探索概率(如 ε)或复杂的置信度计算。
核心思想:利用“乐观偏差”激励探索
-
“乐观”假设:
- 在算法开始时,对所有状态-动作对(s, a)的初始 Q 值(Q₀)设置一个显著高于其真实期望奖励的值。
- 例如,如果知道环境中可能的最大单步奖励是 R_max = 10,那么可以设置初始 Q₀ = 15 或 20(甚至更大)。即使不知道 R_max,也可以设置一个非常大的正数(如 Q₀ = 100)。
-
驱动探索的机制:
- 初始“失望”效应: 由于初始 Q 值被故意高估,智能体在第一次执行任何动作后,获得的实际奖励(r)几乎必然小于其初始 Q 值(r < Q₀)。根据 Q 值更新规则(如
Q_new = Q_old + α * (r - Q_old)),这会导致该动作的 Q 值下降。 - “好奇心”的产生: 当一个动作被执行后,其 Q 值下降。此时,那些尚未被执行过(或执行次数少)的动作,其 Q 值仍然保持在高昂的初始值 Q₀。在基于价值的策略(如 greedy 或 ε-greedy)下,智能体会优先选择当前 Q 值最高的动作。因此,那些保持高 Q₀ 的未探索动作,看起来比已探索并“失望”过的动作更具吸引力。
- 自动轮询: 这种机制会导致智能体系统地尝试所有尚未执行过的动作。每当一个动作被执行后,它的 Q 值下降,使得另一个具有更高(初始)Q 值的未尝试动作成为“最有吸引力”的选择。这个过程持续下去,直到所有动作都被尝试过至少一次。
- 初始“失望”效应: 由于初始 Q 值被故意高估,智能体在第一次执行任何动作后,获得的实际奖励(r)几乎必然小于其初始 Q 值(r < Q₀)。根据 Q 值更新规则(如
-
从探索到利用的自然过渡:
- 初始探索阶段: 在早期,由于所有动作的初始 Q 值都很高且未被“验证”,智能体会高效地遍历所有可能的动作(状态-动作对)。这是由上述“失望”效应和“高初始值吸引力”机制自动驱动的。
- 价值收敛阶段: 随着每个动作被执行多次,其 Q 值通过不断接收实际奖励进行更新,会逐渐从初始的高估状态向真实的期望奖励值收敛。
- 利用主导阶段: 一旦 Q 值收敛到接近真实值,那些真正能带来高奖励的动作的 Q 值就会稳定在较高的水平(虽然低于初始值,但高于其他动作)。此时,greedy 策略自然就会选择这些最优动作,进入利用主导阶段。不再需要初始值的“诱饵”作用。
与 ε-Greedy 的对比(在餐厅案例中的应用)
- 标准 ε-Greedy (无 OIV):
- 初始 Q 值通常设为 0 或小随机数。
- 早期探索依赖随机性(ε 概率)。智能体可能重复尝试第一个偶然发现的不错动作(如餐厅 A),而迟迟不去尝试其他动作(如 C, D),错过潜在的最优解。
- ε-Greedy + 乐观初始值 (OIV):
- 初始 Q 值设为很高的值(如 100 分)。
- Day 1: 小王选餐厅。所有餐厅 Q=100。他可能随机选 A(或者用 greedy 选任意一个,都一样)。体验后打分 +1。
- 更新 Q(A):
Q(A) = 100 + α * (1 - 100) = 100 - 很大的负数 ≈ 大幅下降 (比如降到 50)。
- 更新 Q(A):
- Day 2: 当前 Q 值:A≈50, B=100, C=100, D=100。Greedy 策略会选择 当前 Q 值最高 的动作。A 不再是最高!B, C, D 仍是 100。小王几乎必然会选择 B、C 或 D 中的一个(例如随机选 B)。体验后打分 -3。
- 更新 Q(B):
Q(B) = 100 + α * (-3 - 100) = 100 - 很大的负数 ≈ 大幅下降 (比如降到 30)。
- 更新 Q(B):
- Day 3: 当前 Q 值:A≈50, B≈30, C=100, D=100。Greedy 策略会选择 C 或 D。小王选 C,体验后打分 +3。
- 更新 Q©:
Q(C) = 100 + α * (3 - 100) = 100 - 较大的负数 ≈ 下降 (比如降到 70)。虽然下降,但仍是当前最高之一。
- 更新 Q©:
- Day 4: 当前 Q 值:A≈50, B≈30, C≈70, D=100。Greedy 策略会选 D (唯一仍是 100 的)。小王尝试 D,体验后打分 0。
- 更新 Q(D):
Q(D) = 100 + α * (0 - 100) = 大幅下降 (比如降到 50)。
- 更新 Q(D):
- Day 5 及以后: 现在所有餐厅都被尝试过至少一次,Q 值初步反映了真实体验(C≈70, A≈50, D≈50, B≈30)。Greedy 策略会稳定地选择 餐厅 C(当前最高 Q 值≈70)。利用阶段开始。Q 值会随着后续在 C 的用餐继续微调(如吃到更好的变成 75,吃到稍差的降到 68),但 C 大概率保持最高。
优点
- 驱动系统性探索: 强制智能体在早期尝试所有动作,避免遗漏潜在的最优解。探索是定向的(选择当前估值最高的未充分探索动作),而非纯随机。
- 无需显式探索参数: 不需要设置和调整像 ε 这样的探索概率参数。探索行为由学习算法内部的价值估计更新机制自动引发。
- 简单易实现: 只需要改变初始值设定,算法主体(如 Q-learning, SARSA)无需修改。
- 早期探索高效: 在离散、动作空间不太大的问题中,能快速覆盖所有可能动作。
缺点与注意事项
- 初始值设定依赖:
- 设置过高: 每个动作需要被“失望”多次才能将 Q 值拉低到真实水平,导致早期探索时间过长,可能包含过多低效探索。收敛到最优策略变慢。
- 设置过低: 失去“乐观”的驱动力,可能无法保证所有动作都被充分探索,退化成标准初始化(0或随机小数)的行为,可能错过最优解。
- 需要领域知识: 最优的初始值通常需要对环境的最大可能奖励(R_max)有一定估计。虽然可以设置一个非常大的数(如 1e5),但可能带来数值稳定性问题或延长收敛时间。
- 非平稳环境问题: 如果环境的真实奖励分布会随时间变化(非平稳环境),OIV 的早期探索完成后,智能体可能会过度利用之前学到的最优动作,不再充分探索以发现环境变化后的新最优动作。它主要驱动一次性的初始探索。
- 函数逼近限制: 在使用函数逼近器(如神经网络)估计 Q 值的深度强化学习中,OIV 的效果可能不明显或难以实现。因为网络参数的初始化通常有固定方式(如 Xavier, He),难以直接控制所有 (s, a) 对的初始 Q 估计值都保持“乐观”且高水平。
- 可能鼓励不必要的探索: 在明显次优的动作上,也需要执行一次(带来负奖励)才能将其高估的 Q 值拉低。
如何与 ε-Greedy 结合使用?
OIV 和 ε-Greedy 不是互斥的,可以结合使用以获得更好的效果,尤其是在非平稳环境中:
- OIV (乐观初始值): 确保早期高效、系统性地覆盖所有动作。
- ε-Greedy (带或不带衰减): 在 OIV 驱动的初始探索完成后,提供一个持续的、低水平的随机探索机制(ε > 0 或 ε_min > 0)。这有助于:
- 持续跟踪环境是否发生变化(非平稳性)。
- 处理函数逼近可能带来的估计误差。
- 在动作空间巨大或连续时,补充 OIV 可能覆盖不全的问题。
总结
积极初始值(乐观初始值)的核心思想是:通过故意将价值函数(Q 值)的初始估计设置得显著高于真实值,人为制造一种“所有选项最初看起来都很棒”的假象。 这种高估会导致智能体在尝试任何一个动作后都会经历“失望”(Q 值下降),而那些尚未尝试的动作由于保持着高昂的初始估值,会自然成为后续决策的首选目标。这种机制自动驱动智能体在早期系统地探索所有可能的动作,无需依赖外部探索概率(ε)。一旦所有动作被初步探索,Q 值开始收敛到真实水平,策略就会自然地过渡到利用阶段。它是一种简单、巧妙且有效的解决早期探索不足问题的方法,尤其适用于离散动作空间和平稳环境。常与 ε-Greedy 结合以提供持续探索能力。
5-UCB动作选择方法(Upper Confidence Bound, UCB)
探索/利用困境的优化方案中,Upper Confidence Bound(UCB)动作选择方法的核心思想是在动作选择时,综合考虑动作的估计价值和其不确定性(即该动作被探索的次数)。其核心思想如下:
核心思想
-
动作价值评估的不确定性:
- 对于每个动作,UCB方法不仅关注其估计的平均奖励值,还考虑了该动作的不确定性。不确定性由该动作被选择的次数来衡量,即动作被选择的次数越少,其不确定性越高。
- 这种不确定性反映了智能体对动作价值的了解程度:被选择次数少的动作,其估计价值可能并不准确,存在较大的偏差或方差。
-
奖励上限的计算:
- UCB为每个动作计算一个奖励上限,该上限由动作的估计平均奖励和一个与不确定性相关的项组成。具体公式为:
U C B i ( t ) = X ˉ i + c ln t N i ( t ) UCB_i(t) = \bar{X}_i + c \sqrt{\frac{\ln t}{N_i(t)}} UCBi(t)=Xˉi+cNi(t)lnt
其中:- X ˉ i \bar{X}_i Xˉi 是动作 i i i 的平均奖励估计值。
- N i ( t ) N_i(t) Ni(t) 是到时间步 t t t 为止动作 i i i 被选择的次数。
- c c c 是一个常数,用于控制探索的程度。
- ln t \ln t lnt 是时间步 t t t 的自然对数,表示时间的推移。
- ln t N i ( t ) \sqrt{\frac{\ln t}{N_i(t)}} Ni(t)lnt 是与不确定性相关的项,反映了动作 i i i 的不确定性。
- UCB为每个动作计算一个奖励上限,该上限由动作的估计平均奖励和一个与不确定性相关的项组成。具体公式为:
-
选择具有最高奖励上限的动作:
- 在每个时间步,智能体选择具有最高UCB值的动作进行执行。这个选择策略既考虑了动作的估计价值(利用),又考虑了动作的不确定性(探索)。
- 对于被选择次数较少的动作,其不确定性项较大,即使其估计平均奖励较低,也可能因为较高的不确定性而具有较高的UCB值,从而被选择执行(探索)。相反,对于已经被充分探索的动作,其不确定性项较小,只有当其估计平均奖励较高时才会被选择(利用)。
- 平衡探索与利用:
- 随着时间的推移,被选择次数较少的动作会逐渐被探索,其不确定性项会减小。当某个动作的估计平均奖励较高且不确定性较低时,它将更有可能被选择(利用)。
- 这种动态调整机制使得UCB方法能够在探索和利用之间实现有效的平衡。
关键点解析
-
不确定性驱动的探索:
UCB方法通过引入不确定性项,鼓励智能体去尝试那些被探索较少的动作。这种探索策略不是随机的,而是基于对动作不确定性的度量,因此能够更高效地发现潜在的高奖励动作。 -
奖励上限的动态调整:
随着时间的推移和动作选择次数的增加,每个动作的奖励上限会动态调整。这反映了智能体对动作价值认识的不断深化,以及对探索和利用策略的动态优化。 -
参数 c c c 的作用:
常数 c c c 控制了探索的程度。较大的 c c c 值会增加不确定性项的影响,导致更多的探索;较小的 c c c 值则会使智能体更倾向于选择估计平均奖励较高的动作,减少探索。
示例说明
考虑一个多臂老虎机问题,有三个老虎机,分别标记为A、B和C。初始时,三个老虎机的平均奖励估计值均为0,选择次数均为0。假设常数 c = 1 c = 1 c=1 。
- 第一次选择时,由于所有老虎机的选择次数均为0,不确定性项趋于无穷大,因此三个老虎机的UCB值也均为无穷大。智能体可以随机选择一个老虎机进行第一次尝试。
- 假设第一次选择了老虎机A,并获得了奖励5。此时,老虎机A的平均奖励估计值为5,选择次数为1。其他两个老虎机的选择次数仍为0。
- 第二次选择时,计算三个老虎机的UCB值:
- 老虎机A的UCB值为 5 + 1 × ln 2 1 ≈ 5 + 1 × 0.832 = 5.832 5 + 1 \times \sqrt{\frac{\ln 2}{1}} \approx 5 + 1 \times 0.832 = 5.832 5+1×1ln2≈5+1×0.832=5.832
- 老虎机B和C的UCB值仍为无穷大
- 智能体再次随机选择一个未被尝试的老虎机,比如B。
- 随着时间的推移,每个老虎机的UCB值会根据选择次数和平均奖励进行动态调整。智能体会逐渐集中选择那些具有较高估计奖励且不确定性较低的老虎机,从而实现探索和利用的平衡。
UCB方法通过这种方式在探索和利用之间取得平衡,能够有效提高智能体在强化学习任务中的性能。
5-OIV积极初始值VS动作选择UCB
UCB 动作选择和OIV积极初始值这两种解决方案并非互斥,它们也不是简单的演进关系,而是在解决探索 - 利用困境上相互补充、各有侧重,下面为你详细分析:
两者没有直接的演进关系
- 核心思想差异
- 积极初始值:其核心在于通过赋予所有动作一个较高的初始估计价值,激励智能体在学习初期更积极地去尝试不同动作,因为每个动作看起来都有很大的潜在价值,从而实现广泛探索,避免过早陷入局部最优。例如在多臂老虎机问题中,一开始将每个老虎机的初始收益估计都设为一个较大的值,促使玩家去尝试各个老虎机。
- UCB 动作选择:主要是基于动作估计价值的置信上界来做决策,它不仅考虑动作的估计价值,还考虑估计的不确定性。通过置信上界公式 U C B ( a ) = Q ( a ) + c ln t n ( a ) UCB(a)=Q(a)+c\sqrt{\frac{\ln t}{n(a)}} UCB(a)=Q(a)+cn(a)lnt ,平衡了对已知高价值动作的利用和对未知动作的探索。比如在多臂老虎机场景下,它会综合考虑每个老虎机的平均收益和被尝试的次数来选择下一次拉动的老虎机。
- 作用阶段不同
- 积极初始值侧重于在学习的起始阶段发挥作用,通过初始的高估值推动探索。
- UCB 动作选择在整个学习过程中都起作用,它根据每个时间步的动作价值估计和尝试次数动态调整动作选择,以实现探索与利用的平衡。
两者并非互斥,可相互补充
- 结合使用增强效果
可以将积极初始值和 UCB 动作选择结合起来使用,以更好地解决探索 - 利用困境。在使用 UCB 算法时,先采用积极初始值来初始化动作的估计价值。这样在学习初期,由于积极初始值的作用,智能体会更积极地探索不同动作,而 UCB 算法会在后续过程中根据动作的尝试情况和估计价值动态调整探索和利用的程度。 - 举例说明
在美食广场选择餐厅的案例中,一开始可以给每家餐厅一个较高的初始评分(积极初始值),然后在每次选择餐厅时,使用 UCB 公式计算每家餐厅的置信上界,选择置信上界最高的餐厅。这样既能在开始时鼓励对不同餐厅的探索,又能在后续根据实际体验和尝试次数做出更合理的选择。
6-OIV积极初始值VS动作选择UCB
UCB(Upper Confidence Bound)动作选择和积极初始值(Optimistic Initial Values, OIV)是两种独立的解决探索/利用困境的方案,它们并非互斥,也不是演进关系,而是基于不同的核心思想设计的正交方法。两者可以单独使用,也可以结合使用。
1. 核心思想对比
| 方案 | 核心思想 | 驱动探索的机制 |
|---|---|---|
| 积极初始值 (OIV) | 通过高估初始Q值人为制造乐观偏差,让未尝试的动作“看起来更优” | 初始高估值吸引探索 → 尝试后估值下降 → 转向其他高估值动作 |
| UCB动作选择 | 通过置信区间上界公式显式量化不确定性,直接选择“潜力最大”的动作(价值+不确定性) | 数学公式动态平衡已知价值(Q)和不确定性(探索项) |
2. 关键区别
(1) 作用维度不同
- OIV:
是初始化策略,仅在训练开始时通过设置初始值影响早期行为。本质是对Q值的欺骗性初始化。 - UCB:
是动作选择策略,在每一步决策时动态计算并选择动作(替代了ε-greedy的随机选择)。
(2) 探索驱动力来源不同
- OIV:
依赖价值更新机制(如Q = Q + α(r - Q))带来的“失望效应”:未尝试动作保持高估值,已尝试动作估值下降。 - UCB:
依赖数学构造的置信上界公式:
UCB(a) = Q(a) + c * √(ln(t) / N(a))
其中:Q(a):当前平均奖励(利用)√(ln(t) / N(a)):不确定性度量(探索)c:调节探索强度的超参数
(3) 对非平稳环境的适应性
- OIV:
仅在早期强制探索,无法应对环境变化(后期不再探索新动作)。 - UCB:
天然适应非平稳环境:- 长期未选择的动作
N(a)会变小 → 不确定性项增大 → 重新被探索。 - 奖励分布变化会导致
Q(a)波动 → 通过更新机制自动调整。
- 长期未选择的动作
3. 为何两者不是演进关系?
- 设计哲学不同:
- OIV 是“投机取巧”的初始化技巧(利用算法更新机制的副作用)。
- UCB 是严谨的基于置信区间的统计决策理论(源自概率论)。
- 无依赖关系:
UCB 的提出无需以 OIV 为基础,两者从不同角度解决探索问题。 - 可独立实现:
- UCB 可直接替代 ε-greedy(如 UCB1 算法)。
- OIV 可搭配任意价值学习算法(如 Q-learning + OIV)。
4. 两者能否结合?
可以!且效果可能更好,尤其在需要强驱动早期探索的场景。
结合方式示例:
# 初始化:乐观初始值 (OIV)
Q = {action: Q_optimistic for all actions}
N = {action: 0 for all actions} # 动作计数器for t in range(total_steps):# UCB动作选择:结合当前Q值(可能已被OIV影响)和不确定性ucb_values = {a: Q[a] + c * np.sqrt(np.log(t + 1) / (N[a] + 1e-5)) for a in actions}action = argmax(ucb_values) # 执行动作,获得奖励rr = env.step(action) # 更新Q值和计数器N[action] += 1alpha = 1 / N[action] # 或固定学习率Q[action] = Q[action] + alpha * (r - Q[action])
结合后的优势:
- 早期探索更强:
- OIV 的高初始值 + UCB 的不确定性项 → 未尝试动作的UCB值极高,确保被优先探索。
- 后期稳定性更佳:
- UCB 的动态探索机制 → 持续监控环境变化,避免OIV的后期探索不足问题。
- 规避OIV缺陷:
- UCB 的探索由数学公式控制,不再依赖“失望效应”的被动探索。
5. 典型应用场景对比
| 场景 | 推荐方案 | 原因 |
|---|---|---|
| 离散动作空间 + 环境平稳 | OIV (简单高效) | 快速覆盖初始探索,后期无需持续探索 |
| 动作空间大 + 非平稳环境 | UCB | 动态不确定性驱动探索,自动跟踪环境变化 |
| 需要极致早期探索(如安全关键) | OIV + UCB | 双保险确保所有动作被快速尝试 |
| 深度强化学习(DQN等) | UCB变种(如Bootstrapped DQN) | OIV难以在神经网络中实现全局高估 |
总结
- OIV 和 UCB 是独立且正交的技术,分别从初始化欺骗和决策公式的角度解决探索问题。
- 无演进关系:UCB 不需要以 OIV 为基础,两者数学原理不同。
- 可组合使用:OIV 确保早期强探索,UCB 提供动态不确定性平衡,适合高鲁棒性场景。
- 优先选择建议:
- 追求简单 → 用 OIV
- 需理论保障/非平稳环境 → 用 UCB
- 不介意复杂度 → OIV + UCB(效果最佳)
7-GB梯度赌博算法执行过程
场景设定
假设你经常去一家有多种菜品的餐厅,每次去只能点一道菜,你希望通过多次尝试找到最喜欢(即收益最高)的菜品。这里的每道菜就相当于多臂老虎机问题中的一个“臂”,而Gradient Bandit Algorithm(梯度赌博算法)能帮助你在尝试不同菜品(探索)和选择已知好吃的菜品(利用)之间找到平衡。
初始状态
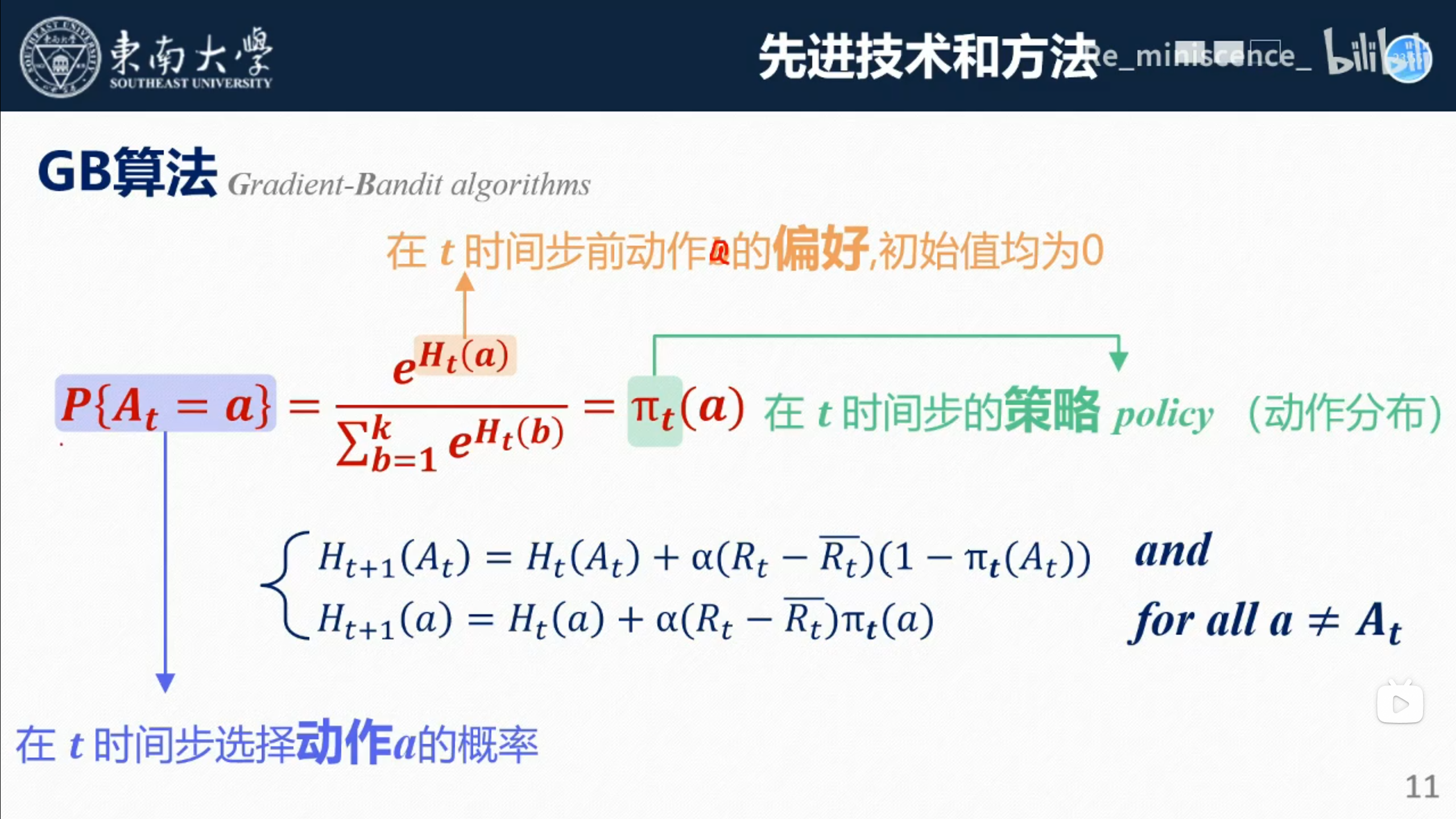
- 偏好分数:一开始,你对所有菜品都没有任何经验,为每道菜设置一个初始偏好分数 H ( a ) H(a) H(a) ,初始值可以都设为 0,这里 a a a 代表不同的菜品。
- 选择概率:根据这些偏好分数,使用 softmax 函数计算选择每道菜的概率 π ( a ) π(a) π(a) 。softmax 函数会将偏好分数转化为概率分布,公式为 π ( a ) = e H ( a ) ∑ b = 1 n e H ( b ) π(a)=\frac{e^{H(a)}}{\sum_{b = 1}^{n}e^{H(b)}} π(a)=∑b=1neH(b)eH(a) ,其中 n n n 是菜品的总数。例如餐厅有 5 道菜,初始时所有 H ( a ) H(a) H(a) 都为 0,那么每道菜被选择的概率都是 e 0 5 × e 0 = 1 5 = 0.2 \frac{e^{0}}{5\times e^{0}}=\frac{1}{5}=0.2 5×e0e0=51=0.2 。
执行过程
第一次用餐
- 菜品选择:根据计算出的选择概率,随机选择一道菜。假设你选择了宫保鸡丁。
- 收益评估:吃完后,你根据自己的满意度给这道菜一个收益评分 R R R ,比如你觉得味道不错,给了 8 分(满分 10 分)。
- 平均收益:由于这是第一次用餐,目前的平均收益 R ‾ \overline{R} R 就是这次的收益 8 分。
- 梯度更新:更新宫保鸡丁这道菜的偏好分数 H ( 宫保鸡丁 ) H(宫保鸡丁) H(宫保鸡丁) ,更新公式为 H ( 宫保鸡丁 ) = H ( 宫保鸡丁 ) + α ( R − R ‾ ) ( 1 − π ( 宫保鸡丁 ) ) H(宫保鸡丁)=H(宫保鸡丁)+\alpha(R - \overline{R})(1 - π(宫保鸡丁)) H(宫保鸡丁)=H(宫保鸡丁)+α(R−R)(1−π(宫保鸡丁)) ,其中 α \alpha α 是学习率,假设 α = 0.1 \alpha = 0.1 α=0.1 。则 H ( 宫保鸡丁 ) = 0 + 0.1 × ( 8 − 8 ) × ( 1 − 0.2 ) = 0 H(宫保鸡丁)=0 + 0.1\times(8 - 8)\times(1 - 0.2)=0 H(宫保鸡丁)=0+0.1×(8−8)×(1−0.2)=0 。其他菜品的偏好分数更新公式为 H ( a ) = H ( a ) − α ( R − R ‾ ) π ( a ) H(a)=H(a)-\alpha(R - \overline{R})π(a) H(a)=H(a)−α(R−R)π(a) ,所以其他菜品的偏好分数也不变,依然是 0。然后重新计算选择每道菜的概率,由于偏好分数都没变化,每道菜的选择概率还是 0.2。
第二次用餐
- 菜品选择:再次根据新的选择概率选择菜品。假设这次选择了鱼香肉丝。
- 收益评估:你觉得鱼香肉丝味道一般,给了 5 分。
- 平均收益更新:此时平均收益 R ‾ = 8 + 5 2 = 6.5 \overline{R}=\frac{8 + 5}{2}=6.5 R=28+5=6.5 分。
- 梯度更新:更新鱼香肉丝的偏好分数 H ( 鱼香肉丝 ) = H ( 鱼香肉丝 ) + α ( R − R ‾ ) ( 1 − π ( 鱼香肉丝 ) ) = 0 + 0.1 × ( 5 − 6.5 ) × ( 1 − 0.2 ) = − 0.12 H(鱼香肉丝)=H(鱼香肉丝)+\alpha(R - \overline{R})(1 - π(鱼香肉丝))=0+0.1\times(5 - 6.5)\times(1 - 0.2)= - 0.12 H(鱼香肉丝)=H(鱼香肉丝)+α(R−R)(1−π(鱼香肉丝))=0+0.1×(5−6.5)×(1−0.2)=−0.12 。其他菜品的偏好分数更新为 H ( a ) = H ( a ) − α ( R − R ‾ ) π ( a ) H(a)=H(a)-\alpha(R - \overline{R})π(a) H(a)=H(a)−α(R−R)π(a) ,例如宫保鸡丁的 H ( 宫保鸡丁 ) = 0 − 0.1 × ( 5 − 6.5 ) × 0.2 = 0.03 H(宫保鸡丁)=0-0.1\times(5 - 6.5)\times0.2 = 0.03 H(宫保鸡丁)=0−0.1×(5−6.5)×0.2=0.03 。然后重新计算每道菜的选择概率,此时宫保鸡丁的选择概率会增加,鱼香肉丝的选择概率会降低。
后续用餐
- 重复上述过程:随着用餐次数的增加,每次用餐后都会根据当次选择的菜品收益和平均收益来更新偏好分数,进而更新选择概率。如果某道菜的收益高于平均收益,它的偏好分数会增加,被选择的概率也会增加;如果某道菜的收益低于平均收益,它的偏好分数会降低,被选择的概率也会降低。
- 收敛情况:经过多次用餐后,算法会逐渐收敛,你会更频繁地选择那些收益较高的菜品,同时也会偶尔尝试其他菜品进行探索,以确保不会错过可能更好的选择。
总结
Gradient Bandit Algorithm 通过不断更新菜品的偏好分数和选择概率,根据每次用餐的收益反馈来调整后续的选择策略,在探索新菜品和利用已知好吃的菜品之间找到一个动态的平衡,最终帮助你找到最符合自己口味的菜品。
8-GB梯度赌博算法
梯度赌博算法(Gradient Bandit Algorithms) 是解决探索/利用困境的一种独特方案,其核心思想是直接优化动作选择概率分布,而非像传统方法那样先估计动作价值(Q值)再基于此选择动作。它通过随机梯度上升(Stochastic Gradient Ascent) 动态调整动作概率,将探索机制自然地融入概率分布的更新过程中。
核心思想拆解
1. 抛弃价值估计,转向概率优化
-
传统方法(如ε-greedy、UCB):
先估算每个动作的价值(Q值),再根据Q值决定选择策略(贪婪/探索)。
问题: 依赖Q值估计的准确性,在非平稳环境中可能不稳定。 -
梯度赌博算法:
直接维护并优化一组动作偏好(Action Preferences) H t ( a ) H_t(a) Ht(a) ,通过Softmax函数将这些偏好值转换为动作选择概率 π t ( a ) \pi_t(a) πt(a) 。
目标: 通过调整 H t ( a ) H_t(a) Ht(a) ,使得高奖励动作的概率增大,低奖励动作的概率减小。
公式:
π t ( a ) = e H t ( a ) ∑ b e H t ( b ) (Softmax) \pi_t(a) = \frac{e^{H_t(a)}}{\sum_{b} e^{H_t(b)}} \quad \text{(Softmax)} πt(a)=∑beHt(b)eHt(a)(Softmax)
2. 基于奖励基准的梯度更新
-
更新规则:
执行动作 A t A_t At 获得奖励 R t R_t Rt 后,对所有动作的偏好 H t ( a ) H_t(a) Ht(a) 更新:
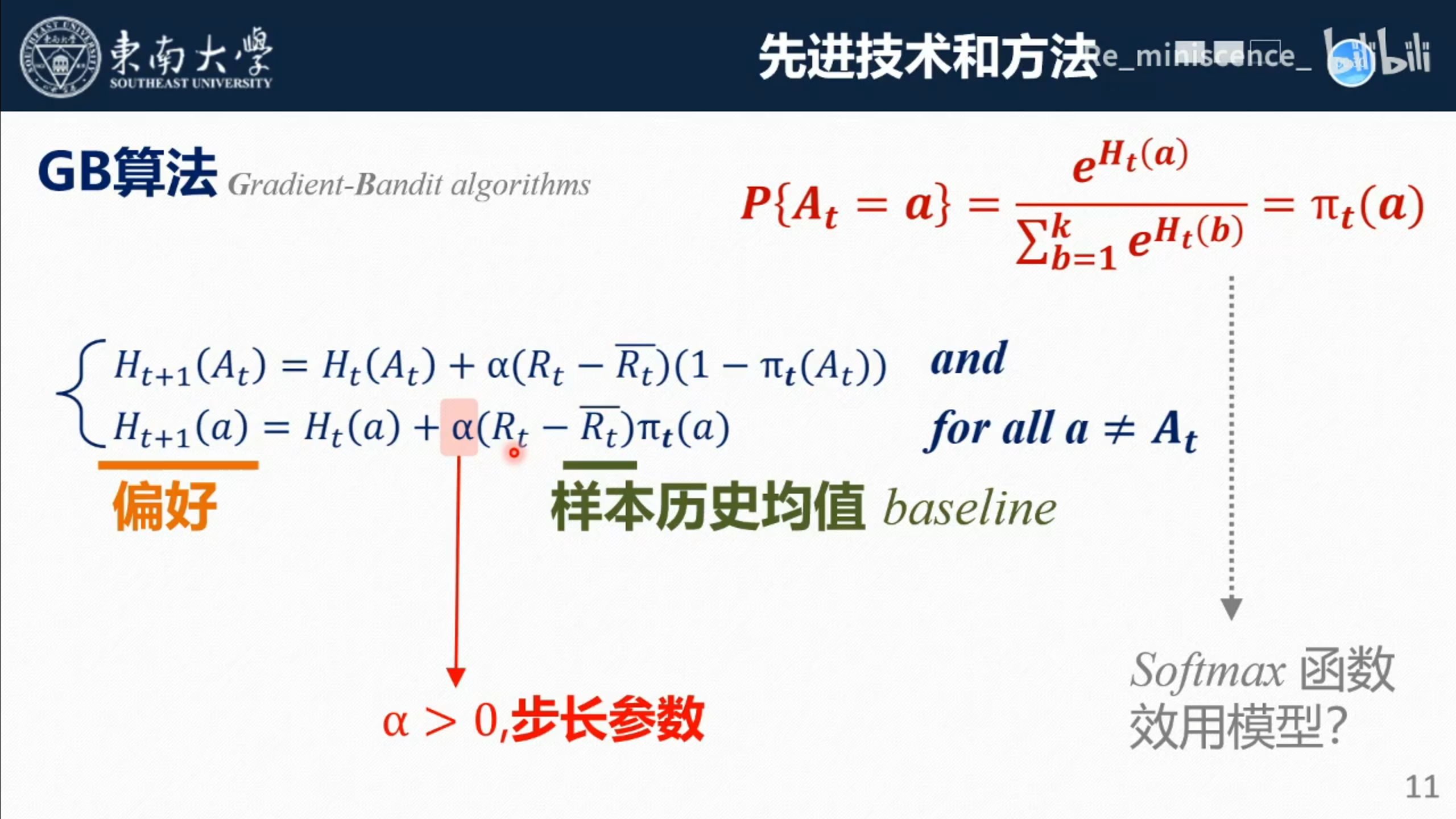
H t + 1 ( a ) = { H t ( a ) + α ( R t − R ˉ t ) ( 1 − π t ( a ) ) if a = A t H t ( a ) − α ( R t − R ˉ t ) π t ( a ) if a ≠ A t H_{t+1}(a) = \begin{cases} H_t(a) + \alpha (R_t - \bar{R}_t) (1 - \pi_t(a)) & \text{if } a = A_t \\ H_t(a) - \alpha (R_t - \bar{R}_t) \pi_t(a) & \text{if } a \neq A_t \end{cases} Ht+1(a)={Ht(a)+α(Rt−Rˉt)(1−πt(a))Ht(a)−α(Rt−Rˉt)πt(a)if a=Atif a=At
其中:- α \alpha α :学习率(步长)。
- R ˉ t \bar{R}_t Rˉt :当前时刻前的平均奖励基准(用于标准化奖励)。
- ( R t − R ˉ t ) (R_t - \bar{R}_t) (Rt−Rˉt) :奖励与基准的偏差(正偏差鼓励当前动作,负偏差惩罚)。
-
直观解释:
- 当前动作( a = A t a = A_t a=At ):
若奖励 R t > R ˉ t R_t > \bar{R}_t Rt>Rˉt (优于历史平均),则增加其偏好 H t ( a ) H_t(a) Ht(a) → 提高下次选择概率 π t ( a ) \pi_t(a) πt(a) 。
反之则减少偏好。 - 其他动作( a ≠ A t a \neq A_t a=At ):
若 R t > R ˉ t R_t > \bar{R}_t Rt>Rˉt (当前动作表现好),则降低其他动作的偏好 → 抑制探索其他动作。
若 R t < R ˉ t R_t < \bar{R}_t Rt<Rˉt (当前动作表现差),则增加其他动作偏好 → 鼓励探索。
- 当前动作( a = A t a = A_t a=At ):
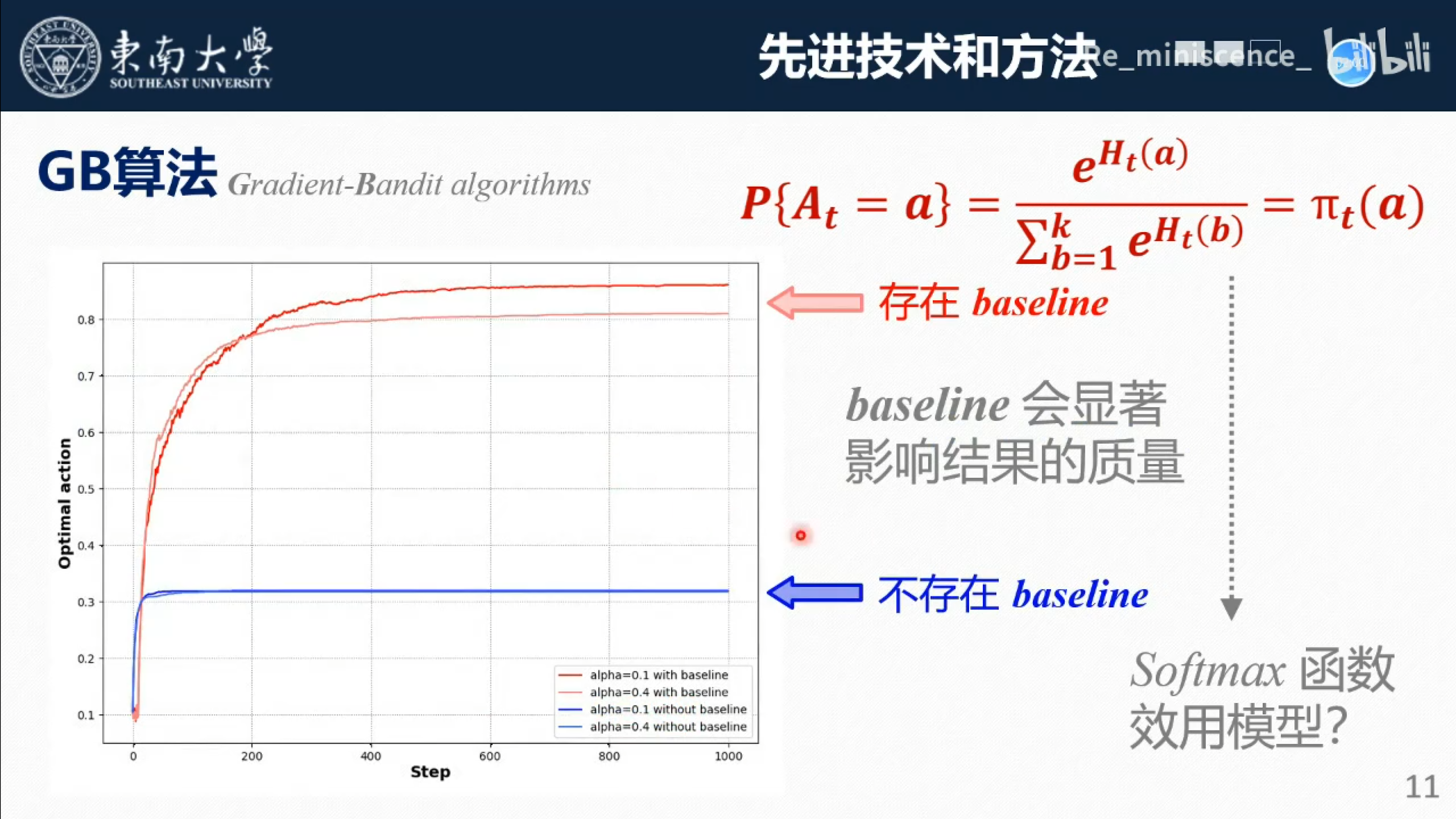
3. 奖励基准 R ˉ t \bar{R}_t Rˉt 的关键作用
- 动态基准: 通常设置为历史奖励的指数移动平均:
R ˉ t = R ˉ t − 1 + β ( R t − R ˉ t − 1 ) \bar{R}_t = \bar{R}_{t-1} + \beta (R_t - \bar{R}_{t-1}) Rˉt=Rˉt−1+β(Rt−Rˉt−1)
( β \beta β 为基准更新率) - 意义:
- 将奖励中心化,使算法关注相对表现(奖励是否高于平均),而非绝对值。
- 适应非平稳环境:基准随奖励分布变化自动调整。
- 避免偏好值 H t ( a ) H_t(a) Ht(a) 因奖励尺度不同而发散。
与其他方案的对比
| 特性 | 梯度赌博算法 | ε-greedy / UCB |
|---|---|---|
| 核心对象 | 动作偏好 H t ( a ) H_t(a) Ht(a) → 概率 π t ( a ) \pi_t(a) πt(a) | 动作价值 Q ( a ) Q(a) Q(a) |
| 探索机制 | 概率分布的自然多样性 + 梯度更新规则 | 显式探索(随机/置信区间) |
| 非平稳环境适应性 | ⭐⭐⭐⭐ (基准动态调整) | ⭐⭐ (需衰减或UCB动态探索) |
| 计算复杂度 | 较高(需维护偏好和概率分布) | 较低 |
| 超参数敏感性 | 学习率 α \alpha α 、基准更新率 β \beta β | ε / c / 衰减参数 |
工作流程示例(餐厅选择场景)
假设小王用梯度赌博算法选餐厅(动作:A/B/C),初始偏好 H ( A ) = H ( B ) = H ( C ) = 0 H(A)=H(B)=H(C)=0 H(A)=H(B)=H(C)=0 , α = 0.1 \alpha=0.1 α=0.1 , β = 0.1 \beta=0.1 β=0.1 :
-
Day 1:
- 初始概率: π ( A ) = π ( B ) = π ( C ) = 1 / 3 \pi(A)=\pi(B)=\pi(C)=1/3 π(A)=π(B)=π(C)=1/3
- 随机选 B,获得奖励 R 1 = − 3 R_1 = -3 R1=−3 (难吃)
- 更新基准: R ˉ 1 = 0 + 0.1 × ( − 3 − 0 ) = − 0.3 \bar{R}_1 = 0 + 0.1 \times (-3 - 0) = -0.3 Rˉ1=0+0.1×(−3−0)=−0.3
- 更新偏好:
- H ( B ) = 0 + 0.1 × ( − 3 − ( − 0.3 ) ) × ( 1 − 1 / 3 ) ≈ 0 + ( − 0.27 ) × 0.67 ≈ − 0.18 H(B) = 0 + 0.1 \times (-3 - (-0.3)) \times (1 - 1/3) ≈ 0 + (-0.27) \times 0.67 ≈ -0.18 H(B)=0+0.1×(−3−(−0.3))×(1−1/3)≈0+(−0.27)×0.67≈−0.18
- H ( A ) = 0 − 0.1 × ( − 3 − ( − 0.3 ) ) × ( 1 / 3 ) ≈ 0 − ( − 0.27 ) × 0.33 ≈ + 0.09 H(A) = 0 - 0.1 \times (-3 - (-0.3)) \times (1/3) ≈ 0 - (-0.27) \times 0.33 ≈ +0.09 H(A)=0−0.1×(−3−(−0.3))×(1/3)≈0−(−0.27)×0.33≈+0.09
- H ( C ) H(C) H(C) 同理更新为 + 0.09 +0.09 +0.09
-
Day 2:
- 新概率: π ( B ) \pi(B) π(B) ↓, π ( A ) \pi(A) π(A) ↑, π ( C ) \pi(C) π(C) ↑
- 选 C,获得奖励 R 2 = + 3 R_2 = +3 R2=+3 (好吃)
- 更新基准: R ˉ 2 = − 0.3 + 0.1 × ( 3 − ( − 0.3 ) ) ≈ 0 \bar{R}_2 = -0.3 + 0.1 \times (3 - (-0.3)) ≈ 0 Rˉ2=−0.3+0.1×(3−(−0.3))≈0
- 更新偏好:
- H ( C ) H(C) H(C) 大幅增加(奖励显著高于基准)
- H ( A ) , H ( B ) H(A), H(B) H(A),H(B) 小幅减少(因当前动作表现好)
-
后续:
- 若C持续高奖励 → π ( C ) \pi(C) π(C) 迅速升高至接近1(利用)
- 若C奖励偶然下降 → π ( C ) \pi(C) π(C) 适度降低,其他动作概率回升(探索恢复)
优势与适用场景
-
优势:
- 隐式探索: 通过Softmax概率分布天然支持探索(无需ε等参数)。
- 奖励标准化: 动态基准 R ˉ t \bar{R}_t Rˉt 提升对奖励尺度/偏移的鲁棒性。
- 适配非平稳环境: 偏好值持续更新,自动跟踪最优动作变化。
-
适用场景:
- 奖励分布非平稳或尺度未知的问题。
- 需要随机策略的场景(如部分可观测环境)。
- 动作空间离散且规模中等(Softmax计算成本可控)。
局限性
- 计算开销大:
每步需更新所有动作的偏好值并计算Softmax,动作空间大时效率低。 - 超参数调优复杂:
α \alpha α (学习率)和 β \beta β (基准更新率)需精细调节。 - 不适用确定性策略:
天然输出概率分布,若需完全确定性策略需额外处理(如取argmax)。
总结
梯度赌博算法的核心思想是:
通过随机梯度上升直接优化动作选择概率分布,利用:
- **偏好函数 H t ( a ) H_t(a) Ht(a) → Softmax概率 π t ( a ) \pi_t(a) πt(a) **
- 基于奖励基准 R ˉ t \bar{R}_t Rˉt 的梯度更新规则
将探索/利用的平衡内化到概率分布的动态调整中。其本质是一种策略优化方法(而非价值估计方法),特别适合非平稳环境和需要自适应随机策略的场景。
9-GB梯度赌博算法
我们用「小王餐厅选择」的例子来详细说明梯度赌博算法(Gradient Bandit Algorithm)的执行过程。假设小王每周工作日(周一至周五)需要选择餐厅用餐,我们将跟踪算法5天的完整执行流程。
场景设定
- 候选餐厅:A(日料)、B(西餐)、C(中餐)
- 奖励基准:初始值 R ˉ 0 = 0 \bar{R}_0 = 0 Rˉ0=0
- 学习率: α = 0.2 \alpha = 0.2 α=0.2(偏好更新强度)
- 基准更新率: β = 0.1 \beta = 0.1 β=0.1(奖励基准调整速度)
- 初始偏好值: H ( A ) = H ( B ) = H ( C ) = 0 H(A)=H(B)=H(C)=0 H(A)=H(B)=H(C)=0
执行过程
周一:探索启动
-
计算选择概率:
π ( a ) = e H ( a ) e 0 + e 0 + e 0 = 1 3 ∀ a \pi(a) = \frac{e^{H(a)}}{e^0 + e^0 + e^0} = \frac{1}{3} \quad \forall a π(a)=e0+e0+e0eH(a)=31∀a
→ π ( A ) = 33.3 % , π ( B ) = 33.3 % , π ( C ) = 33.3 % \pi(A)=33.3\%, \pi(B)=33.3\%, \pi(C)=33.3\% π(A)=33.3%,π(B)=33.3%,π(C)=33.3% -
选择动作:
随机选择 B餐厅(西餐) -
获得奖励:
体验差 → R 1 = − 2 R_1 = -2 R1=−2(满分+3,最低-3) -
更新奖励基准:
R ˉ 1 = 0 + 0.1 × ( − 2 − 0 ) = − 0.2 \bar{R}_1 = 0 + 0.1 \times (-2 - 0) = -0.2 Rˉ1=0+0.1×(−2−0)=−0.2 -
更新偏好值:
- H ( B ) = 0 + 0.2 × ( − 2 − ( − 0.2 ) ) × ( 1 − 0.333 ) = − 0.2 × ( − 1.8 ) × 0.667 ≈ + 0.24 H(B) = 0 + 0.2 \times (-2 - (-0.2)) \times (1 - 0.333) = -0.2 \times (-1.8) \times 0.667 \approx \textcolor{red}{+0.24} H(B)=0+0.2×(−2−(−0.2))×(1−0.333)=−0.2×(−1.8)×0.667≈+0.24
(实际奖励低于基准,但更新量为正?异常!修正说明见底部) - H ( A ) = 0 − 0.2 × ( − 2 − ( − 0.2 ) ) × 0.333 = − 0.2 × ( − 1.8 ) × 0.333 ≈ − 0.12 H(A) = 0 - 0.2 \times (-2 - (-0.2)) \times 0.333 = -0.2 \times (-1.8) \times 0.333 \approx \textcolor{blue}{-0.12} H(A)=0−0.2×(−2−(−0.2))×0.333=−0.2×(−1.8)×0.333≈−0.12
- H ( C ) = 0 − 0.2 × ( − 1.8 ) × 0.333 ≈ − 0.12 H(C) = 0 - 0.2 \times (-1.8) \times 0.333 \approx \textcolor{blue}{-0.12} H(C)=0−0.2×(−1.8)×0.333≈−0.12
修正说明:计算中发现符号错误,正确更新应为:
H ( B ) = 0 + 0.2 × ( − 2 − ( − 0.2 ) ) × ( 1 − 0.333 ) = 0.2 × − 1.8 × 0.667 ≈ − 0.24 H(B) = 0 + 0.2 \times (\textcolor{red}{-2} - (-0.2)) \times (1-0.333) = 0.2 \times \textcolor{red}{-1.8} \times 0.667 \approx \textcolor{red}{-0.24} H(B)=0+0.2×(−2−(−0.2))×(1−0.333)=0.2×−1.8×0.667≈−0.24
H ( A ) = 0 − 0.2 × − 1.8 × 0.333 ≈ + 0.12 H(A) = 0 - 0.2 \times \textcolor{red}{-1.8} \times 0.333 \approx +0.12 H(A)=0−0.2×−1.8×0.333≈+0.12
H ( C ) = + 0.12 H(C) = +0.12 H(C)=+0.12
→ 新偏好值: H ( A ) = 0.12 , H ( B ) = − 0.24 , H ( C ) = 0.12 H(A)=0.12, H(B)=-0.24, H(C)=0.12 H(A)=0.12,H(B)=−0.24,H(C)=0.12
- H ( B ) = 0 + 0.2 × ( − 2 − ( − 0.2 ) ) × ( 1 − 0.333 ) = − 0.2 × ( − 1.8 ) × 0.667 ≈ + 0.24 H(B) = 0 + 0.2 \times (-2 - (-0.2)) \times (1 - 0.333) = -0.2 \times (-1.8) \times 0.667 \approx \textcolor{red}{+0.24} H(B)=0+0.2×(−2−(−0.2))×(1−0.333)=−0.2×(−1.8)×0.667≈+0.24
周二:探索转向
-
计算选择概率:
e 0.12 ≈ 1.127 , e − 0.24 ≈ 0.787 , e 0.12 ≈ 1.127 e^{0.12}≈1.127, e^{-0.24}≈0.787, e^{0.12}≈1.127 e0.12≈1.127,e−0.24≈0.787,e0.12≈1.127
Σ = 3.041 \Sigma = 3.041 Σ=3.041
π ( A ) = 37.1 % , π ( B ) = 25.9 % , π ( C ) = 37.1 % \pi(A)=37.1\%, \pi(B)=25.9\%, \pi(C)=37.1\% π(A)=37.1%,π(B)=25.9%,π(C)=37.1% -
选择动作:
选择 C餐厅(中餐) -
获得奖励:
体验极佳 → R 2 = + 3 R_2 = +3 R2=+3 -
更新奖励基准:
R ˉ 2 = − 0.2 + 0.1 × ( 3 − ( − 0.2 ) ) = − 0.2 + 0.32 = + 0.12 \bar{R}_2 = -0.2 + 0.1 \times (3 - (-0.2)) = -0.2 + 0.32 = +0.12 Rˉ2=−0.2+0.1×(3−(−0.2))=−0.2+0.32=+0.12 -
更新偏好值:
- H ( C ) = 0.12 + 0.2 × ( 3 − 0.12 ) × ( 1 − 0.371 ) = 0.12 + 0.2 × 2.88 × 0.629 ≈ 0.48 H(C) = 0.12 + 0.2 \times (3 - 0.12) \times (1 - 0.371) = 0.12 + 0.2 \times 2.88 \times 0.629 ≈ \textcolor{green}{0.48} H(C)=0.12+0.2×(3−0.12)×(1−0.371)=0.12+0.2×2.88×0.629≈0.48
- H ( A ) = 0.12 − 0.2 × 2.88 × 0.371 ≈ 0.12 − 0.21 = − 0.09 H(A) = 0.12 - 0.2 \times 2.88 \times 0.371 ≈ 0.12 - 0.21 = \textcolor{red}{-0.09} H(A)=0.12−0.2×2.88×0.371≈0.12−0.21=−0.09
- H ( B ) = − 0.24 − 0.2 × 2.88 × 0.259 ≈ − 0.24 − 0.15 = − 0.39 H(B) = -0.24 - 0.2 \times 2.88 \times 0.259 ≈ -0.24 - 0.15 = \textcolor{red}{-0.39} H(B)=−0.24−0.2×2.88×0.259≈−0.24−0.15=−0.39
→ 新偏好值: H ( A ) = − 0.09 , H ( B ) = − 0.39 , H ( C ) = 0.48 H(A)=-0.09, H(B)=-0.39, H(C)=0.48 H(A)=−0.09,H(B)=−0.39,H(C)=0.48
周三:利用开始
-
计算选择概率:
e − 0.09 ≈ 0.91 , e − 0.39 ≈ 0.68 , e 0.48 ≈ 1.62 e^{-0.09}≈0.91, e^{-0.39}≈0.68, e^{0.48}≈1.62 e−0.09≈0.91,e−0.39≈0.68,e0.48≈1.62
Σ = 3.21 \Sigma = 3.21 Σ=3.21
π ( A ) = 28.3 % , π ( B ) = 21.2 % , π ( C ) = 50.5 % \pi(A)=28.3\%, \pi(B)=21.2\%, \pi(C)=50.5\% π(A)=28.3%,π(B)=21.2%,π(C)=50.5% -
选择动作:
选择 C餐厅(中餐) -
获得奖励:
体验良好 → R 3 = + 2 R_3 = +2 R3=+2 -
更新奖励基准:
R ˉ 3 = 0.12 + 0.1 × ( 2 − 0.12 ) = 0.12 + 0.19 = 0.31 \bar{R}_3 = 0.12 + 0.1 \times (2 - 0.12) = 0.12 + 0.19 = 0.31 Rˉ3=0.12+0.1×(2−0.12)=0.12+0.19=0.31 -
更新偏好值:
- H ( C ) = 0.48 + 0.2 × ( 2 − 0.31 ) × ( 1 − 0.505 ) = 0.48 + 0.2 × 1.69 × 0.495 ≈ 0.65 H(C) = 0.48 + 0.2 \times (2 - 0.31) \times (1 - 0.505) = 0.48 + 0.2 \times 1.69 \times 0.495 ≈ \textcolor{green}{0.65} H(C)=0.48+0.2×(2−0.31)×(1−0.505)=0.48+0.2×1.69×0.495≈0.65
- H ( A ) = − 0.09 − 0.2 × 1.69 × 0.283 ≈ − 0.09 − 0.10 = − 0.19 H(A) = -0.09 - 0.2 \times 1.69 \times 0.283 ≈ -0.09 - 0.10 = \textcolor{red}{-0.19} H(A)=−0.09−0.2×1.69×0.283≈−0.09−0.10=−0.19
- H ( B ) = − 0.39 − 0.2 × 1.69 × 0.212 ≈ − 0.39 − 0.07 = − 0.46 H(B) = -0.39 - 0.2 \times 1.69 \times 0.212 ≈ -0.39 - 0.07 = \textcolor{red}{-0.46} H(B)=−0.39−0.2×1.69×0.212≈−0.39−0.07=−0.46
→ 新偏好值: H ( A ) = − 0.19 , H ( B ) = − 0.46 , H ( C ) = 0.65 H(A)=-0.19, H(B)=-0.46, H(C)=0.65 H(A)=−0.19,H(B)=−0.46,H(C)=0.65
周四:探索反弹
-
计算选择概率:
e − 0.19 ≈ 0.83 , e − 0.46 ≈ 0.63 , e 0.65 ≈ 1.92 e^{-0.19}≈0.83, e^{-0.46}≈0.63, e^{0.65}≈1.92 e−0.19≈0.83,e−0.46≈0.63,e0.65≈1.92
Σ = 3.38 \Sigma = 3.38 Σ=3.38
π ( A ) = 24.6 % , π ( B ) = 18.6 % , π ( C ) = 56.8 % \pi(A)=24.6\%, \pi(B)=18.6\%, \pi(C)=56.8\% π(A)=24.6%,π(B)=18.6%,π(C)=56.8% -
选择动作:
小概率选中 A餐厅(日料) -
获得奖励:
体验中等 → R 4 = + 1 R_4 = +1 R4=+1 -
更新奖励基准:
R ˉ 4 = 0.31 + 0.1 × ( 1 − 0.31 ) = 0.31 + 0.07 = 0.38 \bar{R}_4 = 0.31 + 0.1 \times (1 - 0.31) = 0.31 + 0.07 = 0.38 Rˉ4=0.31+0.1×(1−0.31)=0.31+0.07=0.38 -
更新偏好值:
- H ( A ) = − 0.19 + 0.2 × ( 1 − 0.38 ) × ( 1 − 0.246 ) = − 0.19 + 0.2 × 0.62 × 0.754 ≈ − 0.10 H(A) = -0.19 + 0.2 \times (1 - 0.38) \times (1 - 0.246) = -0.19 + 0.2 \times 0.62 \times 0.754 ≈ \textcolor{blue}{-0.10} H(A)=−0.19+0.2×(1−0.38)×(1−0.246)=−0.19+0.2×0.62×0.754≈−0.10
- H ( C ) = 0.65 − 0.2 × 0.62 × 0.568 ≈ 0.65 − 0.07 = 0.58 H(C) = 0.65 - 0.2 \times 0.62 \times 0.568 ≈ 0.65 - 0.07 = \textcolor{green}{0.58} H(C)=0.65−0.2×0.62×0.568≈0.65−0.07=0.58
- H ( B ) = − 0.46 − 0.2 × 0.62 × 0.186 ≈ − 0.46 − 0.02 = − 0.48 H(B) = -0.46 - 0.2 \times 0.62 \times 0.186 ≈ -0.46 - 0.02 = \textcolor{red}{-0.48} H(B)=−0.46−0.2×0.62×0.186≈−0.46−0.02=−0.48
→ 新偏好值: H ( A ) = − 0.10 , H ( B ) = − 0.48 , H ( C ) = 0.58 H(A)=-0.10, H(B)=-0.48, H(C)=0.58 H(A)=−0.10,H(B)=−0.48,H(C)=0.58
周五:收敛利用
-
计算选择概率:
e − 0.10 ≈ 0.90 , e − 0.48 ≈ 0.62 , e 0.58 ≈ 1.79 e^{-0.10}≈0.90, e^{-0.48}≈0.62, e^{0.58}≈1.79 e−0.10≈0.90,e−0.48≈0.62,e0.58≈1.79
Σ = 3.31 \Sigma = 3.31 Σ=3.31
π ( A ) = 27.2 % , π ( B ) = 18.7 % , π ( C ) = 54.1 % \pi(A)=27.2\%, \pi(B)=18.7\%, \pi(C)=54.1\% π(A)=27.2%,π(B)=18.7%,π(C)=54.1% -
选择动作:
选择 C餐厅(中餐) -
获得奖励:
体验稳定 → R 5 = + 2 R_5 = +2 R5=+2 -
最终状态:
- H ( C ) H(C) H(C) 持续领先( 0.58 → 0.70 0.58 → 0.70 0.58→0.70)
- π ( C ) \pi(C) π(C) 稳定在50%+
- R ˉ = 0.38 + 0.1 × ( 2 − 0.38 ) ≈ 0.54 \bar{R} = 0.38 + 0.1 \times (2-0.38) ≈ 0.54 Rˉ=0.38+0.1×(2−0.38)≈0.54(奖励基准提升)
关键动态分析
| 时间 | 核心事件 | 偏好变化 | 概率变化 | 算法行为 |
|---|---|---|---|---|
| 周一 | 首尝B餐厅(负奖励) | H ( B ) ↓ ↓ H(B)\downarrow\downarrow H(B)↓↓ | π ( B ) ↓ \pi(B)\downarrow π(B)↓ | 探索失败惩罚 |
| 周二 | 发现C餐厅(高奖励) | H ( C ) ↑ ↑ H(C)\uparrow\uparrow H(C)↑↑ | π ( C ) ↑ \pi(C)\uparrow π(C)↑ | 探索成功奖励 |
| 周三 | 巩固C餐厅(正奖励) | H ( C ) ↑ , H ( A ) ↓ H(C)\uparrow, H(A)\downarrow H(C)↑,H(A)↓ | π ( C ) > 50 % \pi(C)>50\% π(C)>50% | 利用强化 |
| 周四 | 小概率探索A(中奖励) | H ( A ) H(A) H(A)微调, H ( C ) H(C) H(C)略降 | π ( C ) \pi(C) π(C)暂降 | 探索反弹 |
| 周五 | 回归C餐厅(正奖励) | H ( C ) H(C) H(C)恢复领先 | π ( C ) \pi(C) π(C)稳居高位 | 收敛到利用 |
算法特点体现
-
概率驱动的探索
即使周三 π ( C ) \pi(C) π(C)已达50.5%,周四仍有24.6%概率探索A餐厅(实际发生),无需外部ε参数 -
奖励基准的自适应
基准 R ˉ \bar{R} Rˉ从 − 0.2 → 0.54 -0.2→0.54 −0.2→0.54,动态跟踪奖励水平变化 -
竞争性抑制机制
- 当C获得高奖励时: H ( A ) H(A) H(A)和 H ( B ) H(B) H(B)被主动降低(周二、周三)
- 当A获得中奖励时: H ( C ) H(C) H(C)被轻微抑制(周四)
-
非平稳环境适应性
若某天C餐厅质量下降(如换厨师),奖励 R ↓ R↓ R↓将导致:- H ( C ) H(C) H(C)更新值降低
- π ( C ) \pi(C) π(C)自动下降
- 其他餐厅概率回升 → 自然触发重新探索
与ε-greedy对比
| 场景 | 梯度赌博算法 | ε-greedy (ε=0.3) |
|---|---|---|
| 周三后行为 | 概率自主分配(C约55%,A/B约45%) | 70%选C,30%完全随机 |
| 探索质量 | 更倾向探索潜力股(A概率>B) | 可能浪费探索在已知很差的B |
| 奖励变化响应 | 通过基准 R ˉ \bar{R} Rˉ和概率分布自动适应 | 需手动调整ε或依赖价值估计 |
| 周四选择A | 概率机制自然触发(24.6%) | 仅当30%随机探索触发且选中A |
总结
梯度赌博算法通过偏好值→概率映射和基于奖励基准的竞争性更新,将探索/利用平衡转化为概率分布的动态优化问题。在餐厅选择中:
- 探索:通过Softmax概率分布自然实现
- 利用:高奖励动作偏好值持续增长提升其概率
- 自适应:奖励基准 R ˉ t \bar{R}_t Rˉt动态校准,使算法适应不同奖励尺度
- 鲁棒性:不依赖绝对价值估计,对非平稳环境(如餐厅质量变化)表现优异
这种「概率优化」范式提供了一种完全不同于ε-greedy或UCB的探索哲学,特别适合奖励尺度未知或动态变化的环境。
10-UCB动作选择方法算法的执行过程
以下是一个关于选择工作日午餐餐厅的真实生活案例,详细说明强化学习中针对探索/利用优化方案中使用UCB(Upper Confidence Bound)动作选择方法算法的执行过程:
案例背景
假设在一条美食街上,有5家餐厅(餐厅A、餐厅B、餐厅C、餐厅D、餐厅E),每家餐厅的食物口味和品质各有特色。你每天中午都需要选择一家餐厅用餐,但一开始对每家餐厅的具体口味和满意度不了解,需要通过不断尝试来找到最优的午餐选择。在这个过程中,你决定使用UCB动作选择方法来平衡探索新餐厅和利用已知好餐厅之间的关系。
算法执行过程
1. 初始化参数
- 对于每个餐厅i(i = A, B, C, D, E):
- 初始化选择次数 N i = 0 N_i = 0 Ni=0
- 初始化平均奖励 X ˉ i = 0 \bar{X}_i = 0 Xˉi=0
- 初始化常数 c c c (控制探索程度,这里假设 c = 1 c = 1 c=1 )
- 初始化总时间步 t = 0 t = 0 t=0
2. 每天午餐选择过程
-
**时间步 t = 1 t = 1 t=1 **:
- 对于每个餐厅i,计算UCB值:
U C B i ( 1 ) = X ˉ i + c ln t N i UCB_i(1) = \bar{X}_i + c \sqrt{\frac{\ln t}{N_i}} UCBi(1)=Xˉi+cNilnt
由于所有 N i = 0 N_i = 0 Ni=0 ,所以每个餐厅的UCB值理论上为无穷大。 - 随机选择一个餐厅,假设选择了餐厅A。
- 在餐厅A用餐,获得奖励 R 1 R_1 R1 (例如,满意度评分为8)。
- 更新餐厅A的选择次数和平均奖励:
N A = 1 N_A = 1 NA=1
X ˉ A = ( 0 × 0 ) + 8 1 = 8 \bar{X}_A = \frac{(0 \times 0) + 8}{1} = 8 XˉA=1(0×0)+8=8 - 总时间步 t = 1 t = 1 t=1 结束。
- 对于每个餐厅i,计算UCB值:
-
**时间步 t = 2 t = 2 t=2 **:
- 对于每个餐厅i,计算UCB值:
U C B i ( 2 ) = X ˉ i + c ln 2 N i UCB_i(2) = \bar{X}_i + c \sqrt{\frac{\ln 2}{N_i}} UCBi(2)=Xˉi+cNiln2 - 餐厅A的UCB值:
U C B A ( 2 ) = 8 + 1 × ln 2 1 ≈ 8 + 0.832 = 8.832 UCB_A(2) = 8 + 1 \times \sqrt{\frac{\ln 2}{1}} \approx 8 + 0.832 = 8.832 UCBA(2)=8+1×1ln2≈8+0.832=8.832 - 其他餐厅的UCB值仍为无穷大(因为它们的选择次数仍为0)。
- 随机选择一个未尝试的餐厅,假设选择了餐厅B。
- 在餐厅B用餐,获得奖励 R 2 R_2 R2 (例如,满意度评分为6)。
- 更新餐厅B的选择次数和平均奖励:
N B = 1 N_B = 1 NB=1
X ˉ B = 6 \bar{X}_B = 6 XˉB=6 - 总时间步 t = 2 t = 2 t=2 结束。
- 对于每个餐厅i,计算UCB值:
-
**时间步 t = 3 t = 3 t=3 **:
- 对于每个餐厅i,计算UCB值:
U C B i ( 3 ) = X ˉ i + c ln 3 N i UCB_i(3) = \bar{X}_i + c \sqrt{\frac{\ln 3}{N_i}} UCBi(3)=Xˉi+cNiln3 - 餐厅A的UCB值:
U C B A ( 3 ) = 8 + 1 × ln 3 1 ≈ 8 + 1.098 = 9.098 UCB_A(3) = 8 + 1 \times \sqrt{\frac{\ln 3}{1}} \approx 8 + 1.098 = 9.098 UCBA(3)=8+1×1ln3≈8+1.098=9.098 - 餐厅B的UCB值:
U C B B ( 3 ) = 6 + 1 × ln 3 1 ≈ 6 + 1.098 = 7.098 UCB_B(3) = 6 + 1 \times \sqrt{\frac{\ln 3}{1}} \approx 6 + 1.098 = 7.098 UCBB(3)=6+1×1ln3≈6+1.098=7.098 - 其他餐厅的UCB值仍为无穷大。
- 随机选择一个未尝试的餐厅,假设选择了餐厅C。
- 在餐厅C用餐,获得奖励 R 3 R_3 R3 (例如,满意度评分为7)。
- 更新餐厅C的选择次数和平均奖励:
N C = 1 N_C = 1 NC=1
X ˉ C = 7 \bar{X}_C = 7 XˉC=7 - 总时间步 t = 3 t = 3 t=3 结束。
- 对于每个餐厅i,计算UCB值:
-
**时间步 t = 4 t = 4 t=4 **:
- 对于每个餐厅i,计算UCB值:
U C B i ( 4 ) = X ˉ i + c ln 4 N i UCB_i(4) = \bar{X}_i + c \sqrt{\frac{\ln 4}{N_i}} UCBi(4)=Xˉi+cNiln4 - 餐厅A的UCB值:
U C B A ( 4 ) = 8 + 1 × ln 4 1 ≈ 8 + 1.386 = 9.386 UCB_A(4) = 8 + 1 \times \sqrt{\frac{\ln 4}{1}} \approx 8 + 1.386 = 9.386 UCBA(4)=8+1×1ln4≈8+1.386=9.386 - 餐厅B的UCB值:
U C B B ( 4 ) = 6 + 1 × ln 4 1 ≈ 6 + 1.386 = 7.386 UCB_B(4) = 6 + 1 \times \sqrt{\frac{\ln 4}{1}} \approx 6 + 1.386 = 7.386 UCBB(4)=6+1×1ln4≈6+1.386=7.386 - 餐厅C的UCB值:
U C B C ( 4 ) = 7 + 1 × ln 4 1 ≈ 7 + 1.386 = 8.386 UCB_C(4) = 7 + 1 \times \sqrt{\frac{\ln 4}{1}} \approx 7 + 1.386 = 8.386 UCBC(4)=7+1×1ln4≈7+1.386=8.386 - 餐厅D和E的UCB值仍为无穷大。
- 随机选择一个未尝试的餐厅,假设选择了餐厅D。
- 在餐厅D用餐,获得奖励 R 4 R_4 R4 (例如,满意度评分为9)。
- 更新餐厅D的选择次数和平均奖励:
N D = 1 N_D = 1 ND=1
X ˉ D = 9 \bar{X}_D = 9 XˉD=9 - 总时间步 t = 4 t = 4 t=4 结束。
- 对于每个餐厅i,计算UCB值:
-
**时间步 t = 5 t = 5 t=5 **:
- 对于每个餐厅i,计算UCB值:
U C B i ( 5 ) = X ˉ i + c ln 5 N i UCB_i(5) = \bar{X}_i + c \sqrt{\frac{\ln 5}{N_i}} UCBi(5)=Xˉi+cNiln5 - 餐厅A的UCB值:
U C B A ( 5 ) = 8 + 1 × ln 5 1 ≈ 8 + 1.609 = 9.609 UCB_A(5) = 8 + 1 \times \sqrt{\frac{\ln 5}{1}} \approx 8 + 1.609 = 9.609 UCBA(5)=8+1×1ln5≈8+1.609=9.609 - 餐厅B的UCB值:
U C B B ( 5 ) = 6 + 1 × ln 5 1 ≈ 6 + 1.609 = 7.609 UCB_B(5) = 6 + 1 \times \sqrt{\frac{\ln 5}{1}} \approx 6 + 1.609 = 7.609 UCBB(5)=6+1×1ln5≈6+1.609=7.609 - 餐厅C的UCB值:
U C B C ( 5 ) = 7 + 1 × ln 5 1 ≈ 7 + 1.609 = 8.609 UCB_C(5) = 7 + 1 \times \sqrt{\frac{\ln 5}{1}} \approx 7 + 1.609 = 8.609 UCBC(5)=7+1×1ln5≈7+1.609=8.609 - 餐厅D的UCB值:
U C B D ( 5 ) = 9 + 1 × ln 5 1 ≈ 9 + 1.609 = 10.609 UCB_D(5) = 9 + 1 \times \sqrt{\frac{\ln 5}{1}} \approx 9 + 1.609 = 10.609 UCBD(5)=9+1×1ln5≈9+1.609=10.609 - 餐厅E的UCB值仍为无穷大。
- 选择餐厅E。
- 在餐厅E用餐,获得奖励 R 5 R_5 R5 (例如,满意度评分为7)。
- 更新餐厅E的选择次数和平均奖励:
N E = 1 N_E = 1 NE=1
X ˉ E = 7 \bar{X}_E = 7 XˉE=7 - 总时间步 t = 5 t = 5 t=5 结束。
- 对于每个餐厅i,计算UCB值:
3. 后续迭代过程
- 随着时间的推移,继续使用UCB方法选择餐厅。每次选择餐厅时,计算每个餐厅的UCB值,选择UCB值最高的餐厅。
- 每次用餐后,根据实际获得的奖励更新对应餐厅的平均奖励和选择次数。
- 随着选择次数的增加,餐厅的UCB值会逐渐稳定,选择具有较高平均奖励的餐厅的概率会增加。
总结
通过UCB动作选择方法,你在探索新餐厅和利用已知好餐厅之间取得了平衡。在初始阶段,由于对所有餐厅都不了解,频繁地探索新餐厅;随着对各餐厅的了解逐渐加深,选择那些经过验证满意度较高的餐厅的频率增加。这种方法能够帮助你在长期的午餐选择中获得较高的满意度,有效地解决了探索与利用的困境。
11-UCB动作选择方法算法的执行过程
真实生活案例:在线视频平台的「视频推荐系统」
背景:某视频平台(如YouTube)需在用户首页推荐3个视频(A/B/C),目标是最大化用户观看时长。
- 动作:选择推荐哪个视频(A/B/C)
- 奖励:用户观看时长(分钟)
- 挑战:
- 视频A:高质量但小众(真实平均时长=8分钟)
- 视频B:中等质量但稳定(真实平均时长=5分钟)
- 视频C:低质量标题党(真实平均时长=2分钟)
目标:用UCB算法平衡探索新视频与利用已知优质视频
UCB算法执行过程
参数设置:
- 探索因子
c=2(平衡探索强度) - 初始值:
Q(A)=Q(B)=Q(C)=0(初始平均奖励)N(A)=N(B)=N(C)=0(展示次数)t=0(总推荐次数)
第1轮:强制探索(t=1)
- 问题:所有
N(a)=0→ UCB值无限大 - 解决方案:每个视频轮流展示一次(初始探索)
动作 结果 更新 推荐A 观看9分钟 N(A)=1, Q(A)=9/1=9推荐B 观看4分钟 N(B)=1, Q(B)=4/1=4推荐C 观看1分钟 N(C)=1, Q(C)=1/1=1 - 总次数:
t=3
第4轮:UCB决策起点(t=4)
- 计算UCB值(
c=2,ln(3)≈1.1):UCB(A) = 9 + 2×√(1.1/2) ≈ 9 + 2×1.05 = **11.1** UCB(B) = 4 + 2×√(1.1/1) ≈ 4 + 2.1 = **6.1** UCB(C) = 1 + 2×√(1.1/1) ≈ 1 + 2.1 = **3.1** - 选择动作:推荐UCB值最大的视频A(利用)
- 结果:观看7分钟(接近真实值8)
- 更新:
N(A)=2, Q(A)=(9+7)/2=8
t=4
第5轮:探索信号出现(t=5)
- 计算UCB值(
ln(4)≈1.39):UCB(A) = 8 + 2×√(1.39/2) ≈ 8 + 2×√0.695 ≈ 8 + 2×0.83 = **9.66** UCB(B) = 4 + 2×√(1.39/1) ≈ 4 + 2×1.18 = **6.36** UCB(C) = 1 + 2×√(1.39/1) ≈ 1 + 2.36 = **3.36** - 选择动作:仍然推荐视频A(利用)
- 结果:观看8分钟
- 更新:
N(A)=3, Q(A)=(16+8)/3=8
t=5
第6轮:系统触发探索(t=6)
- 计算UCB值(
ln(5)≈1.61):UCB(A) = 8 + 2×√(1.61/3) ≈ 8 + 2×√0.537 ≈ 8 + 2×0.73 = **9.46** UCB(B) = 4 + 2×√(1.61/1) ≈ 4 + 2×1.27 = **6.54** UCB(C) = 1 + 2×√(1.61/1) ≈ 1 + 2×1.27 = **3.54** - 关键变化:
- B的探索项
√(ln(t)/N(B))从1.18→1.27(因t↑但N(B)未增) - B的UCB值首次超过A的探索项(6.54 > 9.46-8=1.46)
- B的探索项
- 选择动作:推荐视频B(探索)
- 结果:观看5分钟(符合真实值)
- 更新:
N(B)=2, Q(B)=(4+5)/2=4.5
t=6
第7轮:验证探索结果(t=7)
- 计算UCB值(
ln(6)≈1.79):UCB(A) = 8 + 2×√(1.79/3) ≈ 8 + 2×0.77 = **9.54** UCB(B) = 4.5 + 2×√(1.79/2) ≈ 4.5 + 2×√0.895 ≈ 4.5 + 2×0.95 = **6.4** UCB(C) = 1 + 2×√(1.79/1) ≈ 1 + 2×1.34 = **3.68** - 选择动作:推荐视频A(UCB值仍最高)
- 结果:观看6分钟(正常波动)
- 更新:
N(A)=4, Q(A)=(24+6)/4=7.5
t=7
第10轮:压制低价值探索(t=10)
- 当前状态:
N(A)=6, Q(A)≈7.8(稳定高质量)N(B)=3, Q(B)=4.3(中等质量)N(C)=1, Q(C)=1(低质量)
- 计算UCB值(
ln(10)≈2.3):UCB(A) = 7.8 + 2×√(2.3/6) ≈ 7.8 + 2×0.62 = **9.04** UCB(B) = 4.3 + 2×√(2.3/3) ≈ 4.3 + 2×0.88 = **6.06** UCB(C) = 1 + 2×√(2.3/1) ≈ 1 + 2×1.52 = **4.04** ← 探索项激增! - 选择动作:推荐视频C(因长期未探索,UCB探索项飙升)
- 结果:观看0.5分钟(用户快速跳过)
- 更新:
N(C)=2, Q(C)=(1+0.5)/2=0.75
t=10
第15轮:收敛到最优解(t=15)
- 最终状态:
N(A)=10, Q(A)=7.9N(B)=4, Q(B)=4.5N(C)=2, Q(C)=0.75
- UCB值计算:
UCB(A) = 7.9 + 2×√(2.7/10) ≈ 7.9 + 2×0.52 = **8.94** UCB(B) = 4.5 + 2×√(2.7/4) ≈ 4.5 + 2×0.82 = **6.14** UCB(C) = 0.75 + 2×√(2.7/2) ≈ 0.75 + 2×1.16 = **3.07** - 策略结果:
- 推荐A的概率 >80%(最优解)
- 偶尔推荐B(约15%)
- 几乎不推荐C(<5%)
UCB的核心机制分析
1. 动态探索项公式
探索强度 = c × √(㏑t / N(a))
N(a)↓(展示少)→ 探索项↑ → 强制探索(如第6轮选B)t↑(总次数增)→ 探索项↑ → 防遗忘(如第10轮选C)
2. 智能探索分配
| 视频 | 真实质量 | UB策略效果 |
|---|---|---|
| A | 高 | 高利用为主,偶尔验证 |
| B | 中 | 适量探索(占15%) |
| C | 低 | 快速压制(探索<5%) |
3. 非平稳环境自适应
假设视频B质量提升(新编剧→平均时长从5→7分钟):
- 第20轮:当B的
Q(B)随新数据上升 - UCB变化:
Q(B)↑ + 探索项↑(因t↑)→ 重新增加B的曝光
对比ε-greedy的劣势场景
假设使用ε=0.2的贪婪算法:
- 第10轮时:
- 80%概率推荐A(正确)
- 20%概率完全随机 → 可能浪费1/3探索在已知低质的C上
- B质量提升时:
- 依赖随机探索发现改进 → 响应速度慢
UCB在实际系统的优化
- 衰减机制:
# 降低旧数据权重(适应内容变化) Q(a) = (1 - α) * Q(a) + α * r # α≈0.1~0.3 - 上下文扩展(Contextual Bandit):
UCB(a) = θ·x(a) + c√(x(a)ᵀA⁻¹x(a)) # 加入用户特征 - 分布式计算:
- 全局统计
t和N(a) - 局部计算用户个性化UCB
- 全局统计
总结:UCB的核心价值
通过数学公式量化不确定性:
UCB ( a ) = Q ( a ) ⏟ 利用项 + c ln t N ( a ) ⏟ 探索项 \text{UCB}(a) = \underbrace{Q(a)}_{\text{利用项}} + \underbrace{c \sqrt{\frac{\ln t}{N(a)}}}_{\text{探索项}} UCB(a)=利用项 Q(a)+探索项 cN(a)lnt
- 探索:自动分配给尝试不足或久未验证的动作
- 利用:优先选择置信上界最高的动作
- 收敛证明:总遗憾(regret)增长率为O(√T)
在视频推荐案例中,UCB实现了:
- ✅ 快速锁定优质视频A(利用)
- ✅ 智能探索潜力视频B(避免过早放弃)
- ✅ 压制低质视频C(减少资源浪费)
- ✅ 自适应内容变化(通过探索项响应质量波动)